V
主页
Slam - 20分钟完成瑞典的乌普萨拉大教堂的扫描
发布人
利用激光Lidar扫描数据+Slam技术,将获取的扫描数据实时反馈给无人机,实现在无GPS环境下自主导航,自主避障,自主飞行!让您的飞行更加智能,高效,安全!更多信息请登录我司官网 http://www.thjymap.com 了解,或微信搜索公众号:北京天弘基业科技
打开封面
下载高清视频
观看高清视频
视频下载器
Slam - 25分钟完成地铁站高精度扫描
DJI P1之WPM绕飞与智能扫摆
Slam - 桥梁飞行扫描
Slam - 21分钟完成斯图加特保时捷博物馆背包扫描
Slam-室内库存方量扫描
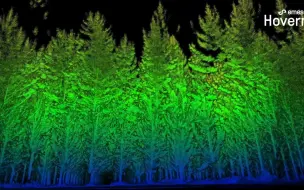
Slam - 树丛底部与顶部扫描合并
Slam -10分钟完成地下金矿破碎机扫描
Slam-地下矿山巷道自动飞行扫描
Slam - 铁矿石盘点扫描
Slam-树林中全自动避障飞行扫描
Slam - 地下竖井巷道扫描
Slam - 基律纳铁矿山地震后的矿面检测
T12_激光扫描数据拼接
M300RTK航线规划教程
PCA点云智绘录制视频动画教程
T9_照片一致性过滤器
3Dflow小贴士 - 计算距离
T10_自定义UVs纹理
3Dflow小贴士 - 提取中空体积
T4_选择和清理工具
Slam - 建筑及立面检测
PCA一键式分类处理
DJI P1环绕飞行工作流及实景模型赏析
深入浅出带您理解点云智绘(PCA)及应用
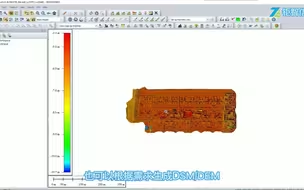
3Dflow小贴士 - 通过DSM生成高程剖面
T7_控制点-01
T13_为游戏引擎生成低聚三维模型
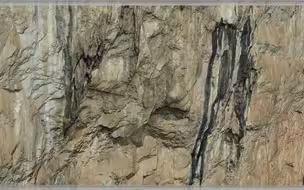
花山岩画实景建模
3DFlow 小贴士 - 三维模型对齐X或Y轴
3Dflow小贴士 - 如何导入已有的要素
T5_视频建模
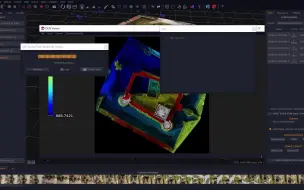
PCA Viewer中点云数据分块教程
大疆P1环绕飞行实景建模
T17 - 绘制元素
PCA如何手动编辑点云类别
智能扫摆
二维正射
220KV变电站实景建模
PCA点云智绘渲染动画效果
3Dflow小贴士 - 提取截面