V
主页
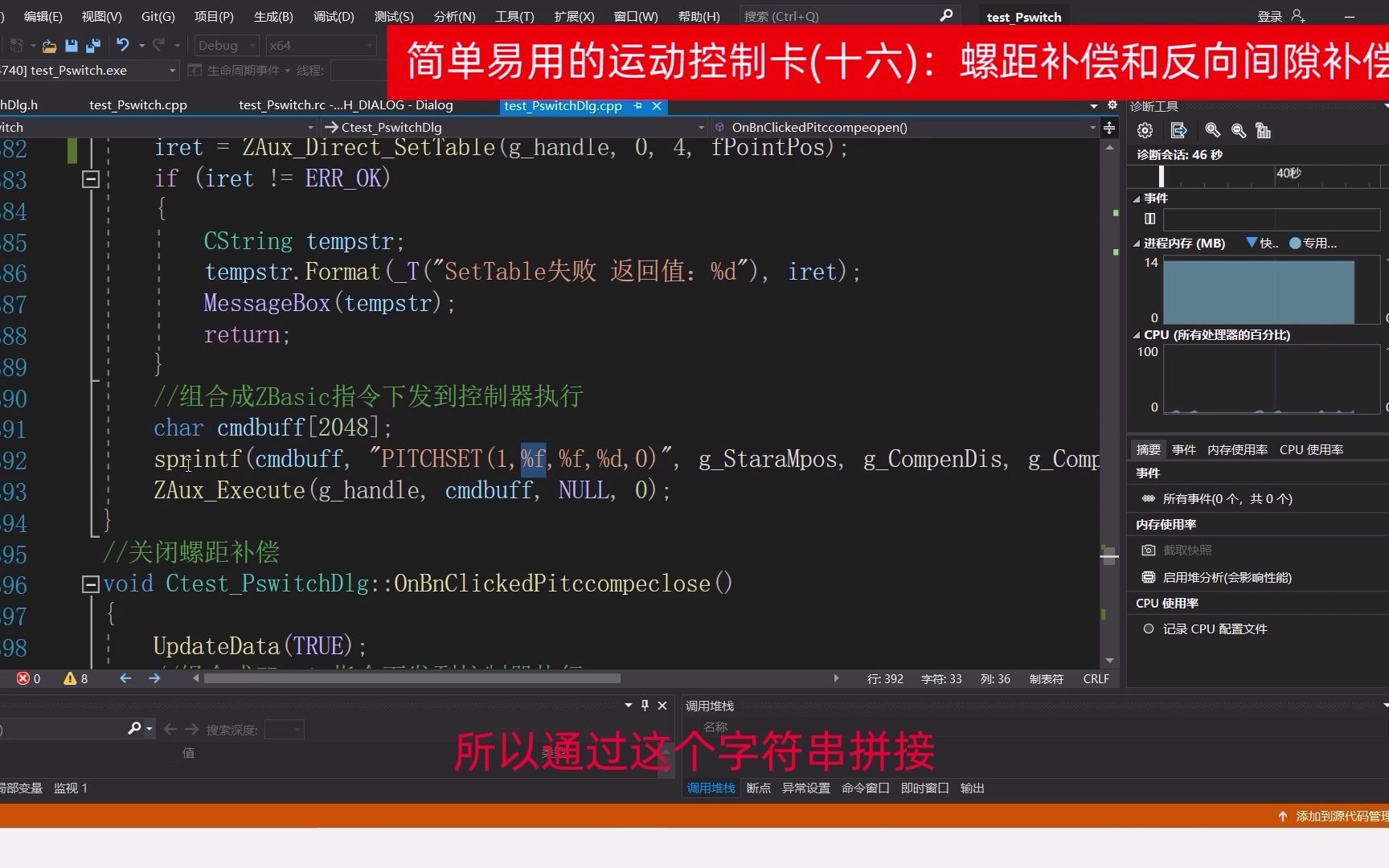
简单易用的运动控制卡(十六):螺距补偿和反向间隙补偿
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
简单易用的运动控制卡(七):一次性加载多条连续小线段数据
简单易用的运动控制卡(八):直线插补和手轮运动
简单易用的运动控制卡(十):连续插补和小线段前瞻
简单易用的运动控制卡(十三):IO动作与运动控制的同步
简单易用的运动控制卡(四)函数库封装
简单易用的运动控制卡(二):外设读写与ZDevelop诊断
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(二):EtherCAT总线初始化
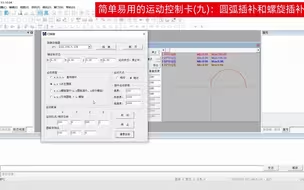
简单易用的运动控制卡(九):圆弧插补和螺旋插补
经济型EtherCAT运动控制器(十):EtherCAT总线初始化
国产最优性价比的4轴网络式运动控制卡,出色的控制技术,让您的设备在自动化行业内卷中脱颖而出!
高性能的64轴总线型运动控制卡PCI464E
EtherCAT运动控制器上位机开发之Python+Qt(三):PDO配置与SDO读写
EtherCAT运动控制器上位机开发之Python+Qt(二):回零
x86平台实时Windows机器视觉EtherCAT运动控制器VPLC711
EtherCAT运动控制卡开发教程之Qt(下):SCARA机械手正反解的建立
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发之驱动安装
简单易用的运动控制卡(五)IO配置与回零运动
【EtherCAT同步周期快至100us】超高实时性PCIe EtherCAT控制卡PCIE464
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(六):硬件位置比较输出和编码器锁存
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(五):通过RTSys进行调试与诊断
简单易用的运动控制卡(十五)PC启停控制器的实时程序
简单易用的运动控制卡(六)basic文件下载和连续轨迹加工
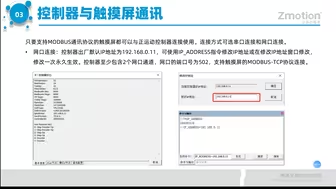
正运动技术视频教程:如何进行运动控制器与触摸屏通讯?
正运动技术视频:如何进行运动控制器输入/输出IO的应用?
EtherCAT运动控制器上位机之Python+Qt(一):链接与单轴运动
简单易用的运动控制卡(十一):运动的暂停恢复和速度倍率设置
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(三):EtherCAT总线CSP,CSV,CST模式切换
高性能PCIe EtherCAT运动控制卡 | XPCIE1032H
离线仿真调试,加快项目进程
正运动运动器视频教程:运动控制器基础轴参数与基础运动控制指令
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(四):板载IO与总线扩展IO的编码器与脉冲配置的应用
运动控制+机器视觉Demo软件框架(一)机械参数和配方文件的管理
开放式激光振镜运动控制器在锂电激光加工的应用解决方案
二维/三维的多轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发
简单易用的运动控制卡(十二):运动控制系统的安全设置
视觉同步点胶系统——可在运动状态中实现同步跟随加工
PCIe EtherCAT实时运动控制卡PCIE464的IO与编码器读写应用
全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工的Python+Qt开发
EtherCAT运动控制卡在LabVIEW中的运动控制与步数据采集
高性价比的EtherCAT运动控制器XPLC1664E2