V
主页
京东 11.11 红包
A Fractal Suction-based Robotic Gripper for Versatile Grasping
发布人
Transformative Robotics Lab Abstract: Suction-based robotic grippers are common in industrial applications due to their simplicity and robustness but struggle with geometric complexity. Grippers that can handle varied surfaces as easily as traditional suction grippers would be more effective. Here we show how a fractal structure allows suction-based grippers to increase conformability and expand approach angle range. We develop a model for how the design parameters affect the range of curvatures and payloads a gripper can hold, and show when joint braking can increase payload capacity. We build a prototype gripper and develop a compact vacuum brake system for it. We then perform a series of experiments that demonstrate how the fractal structure enables corner grasping and expands the approach angle range from 5° to 45°. We also show that adding brakes improves performance by over 30% at moderate contact angles. This work demonstrates how fractal structures increase the utility of suction grippers through underactuation and locking.
打开封面
下载高清视频
观看高清视频
视频下载器
Cable Traversing Bimanual Robotic Manipulators for Expandable Range Application
Introducing Harmony SHR–the latest in upper-extremity robotic rehabilitation
可爱的机器人宠物 MOFLIN - An AI Pet Robot with Emotional Capabilities
Contact models for the design of robotic grasping and manipulation_ Hannah Stuar
Versatile Articulated Aerial Robot DRAGON- Aerial Manipulation and Grasping
Robot Imagination_ Affordance-Based Reasoning Unknown Objects
Biorobotics for Personal Assistance
Programming for Robotics
虚拟操控 Virtually turning robotic manipulators into worn devices
[Vstone] Teleworking with Robot [Robovie-Z]
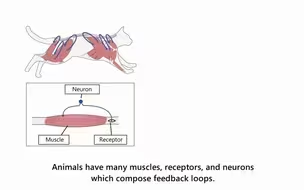
Brainless Running- A Robotic Cat with Solely Mechanical Spinal Reflexes
生动的美女机器人十年前就有了
A butterfly-stroke-like soft robotic swimmer that is fast and efficient
CMU Faculty Dialogues- Softbotics
Learning Quadrupedal Locomotion over Challenging Terrain
Perceptual Robot Learning
(中字)外网主播无意中发现一个由AI组成的暗网社交网络?
Centauro robot stepping up a 0.3 m platform while carrying 17 kg payload at its
BRUCE--Bipedal Robot Unit with Compliance Enhanced
Robotics Pathways & Careers- Kimberly Hambuchen, NASA
Automatica 2022 recap
Fast Dynamic Walking with RH5 Humanoid Robot
Kinegami_ Algorithmic Design of Compliant Kinematic Chains From Tubular Origami
A Multi-body Tracking Framework - From Rigid Objects to Kinematic Structures
Towards Adaptive Human-Robot Teams Workload Estimation - Julie Adams, Oregon Sta
ICRA 2022 Workshop Challenges and Opportunities of Bio-inspired Design, Actuatio
Ascento: Automated Outdoor Security Patrolling
RI Seminar_ Ankur Mehta _ Towards $1 robots
Castor Oil-based Elastomers for Sustainable Soft Robotics
ICRA 2021 Plenary Talk -- Robotics and Automation in Micro & Nano-Scales
LittleDog Clips and Outtakes
人类与机器人战斗了一百年,但2045年他们发现自己不是人类
Statistics
MIT 6.800/6.843 Robotic Manipulation (Fall 2021) - Russ Tedrake
Tapomayukh Bhattacharjee - Robot assisted feeding- exploring autonomy with perce
Robot Discussion between Marc Raibert & Daniela Rus - Daniela Rus & Marc Raibert
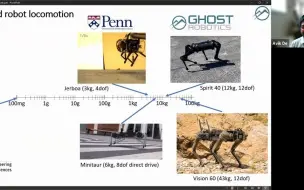
Design and control of insect-scale bees and dog-scale quadrupeds
Dmitry Berenson - Learning Where to Trust Unreliable Dynamics Models
Festo BionicSwift 2021