V
主页
京东 11.11 红包
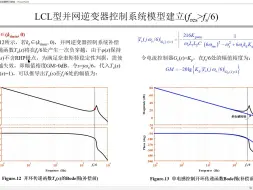
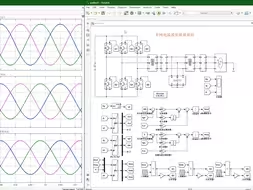
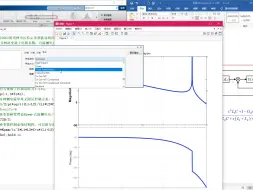
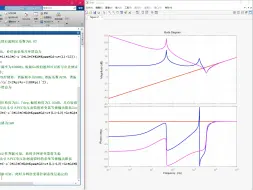
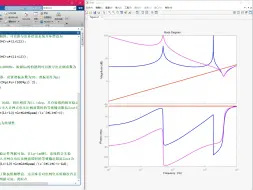
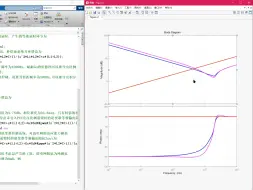
LCL型并网逆变器电容电流反馈有源阻尼控制策略参数设计,LCL滤波器谐振频率>1/6采样频率 ,系统含有正实部开环极点
发布人
LCL型并网逆变器电容电流反馈有源阻尼控制策略参数设计,LCL滤波器谐振频率>1/6采样频率 ,系统含有正实部开环极点
打开封面
下载高清视频
观看高清视频
视频下载器
LCL滤波器谐振频率高于1/6的采样频率时,采用逆变器侧电流反馈控制+电容电流反馈有源阻尼,在弱电网条件下的稳定性改善控制策略。
LCL滤波器谐振频率高于1/6采样频率,提出采用陷波器进行电容电流有源阻尼+机侧电流反馈闭环控制策略
LCL滤波器谐振频率高于1/6采样频率,提出一种采用低通滤波器进行电容电流有源阻尼+机侧电流反馈闭环控制策略
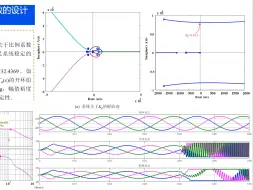
Kd<0,LCL型并网逆变器电容电流反馈有源阻尼控制策略参数设计,LCL滤波器谐振频率>1/6采样频率 ,系统含有正实部开环极点
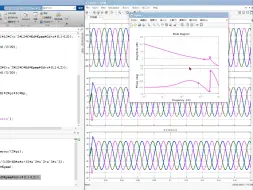
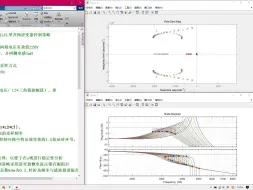
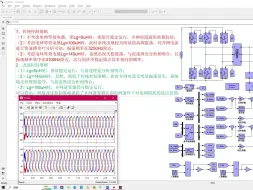
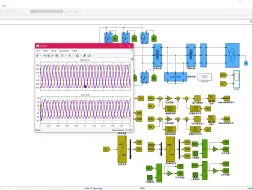
LCL型并网逆变器弱电网下鲁棒性电容电流反馈有源阻尼控制策略设计及Simulink仿真模型搭建
弱电网下LCL型并网逆变器稳定性改善方案_相位超前校正器(1)
针对LCL型并网逆变器采用电容电流反馈有源阻尼时,当滤波器谐振频率低于采样频率的1/6,并且阻尼系数小于0时的不稳定工况,一个简单的稳定性改善方案提出。
LCL型并网逆变器电容电流反馈有源阻尼控制策略参数设计,LCL滤波器谐振频率小于1/6采样频率 ,系统含有正实部开环极点
单相LCL型并网逆变器电容电流反馈有源阻尼控制系统设计及Simulink仿真模型搭建
采用逆变器侧电流反馈有源阻尼的三相LCL型并网逆变器控制策略设计及Simulink仿真模型
LCL型并网逆变器采用并网侧电流单环无阻尼反馈控制策略的稳定性分析及控制器参数设计方法
三相LCL型并网逆变器dq坐标系采用逆变器机侧电感电流反馈有源阻尼的控制系统设计及Simulink仿真模型搭建
Simulink模型:弱电网下一种提高LCL型并网逆变器对电网阻抗适应能力的电容电流有源阻尼控制策略
十点半频率,可以说明一切
弱电网下,采用逆变器机侧电流反馈有源阻尼的强鲁棒性LCL型并网逆变器控制策略,考虑电网电感在0mH到10mH范围内变化,参数设计及Simulink仿真模型搭建
采用并网侧电流反馈有源阻尼的三相LCL型并网逆变器控制策略
三相LCL型并网逆变器电容电流反馈有源阻尼控制系统设计及Simulink仿真模型搭建
LCL型并网逆变器电容电流反馈有源阻尼的来源及数字控制延时造成的影响
弱电网下LCL型并网逆变器稳定性改善方案_全通滤波器(7)
Simulink仿真模型搭建:LCL型并网逆变器基于SOGI的网压前馈特定次谐波抑制+无阻尼网侧电流单环反馈控制
三相LCL型并网逆变器旋转坐标系电容电流有源阻尼控制系统设计及Simulink仿真模型搭建
采用双二阶相位超前校正控制器进行电容电流有源阻尼控制策略,用以提高弱电网下LCL型并网逆变器的鲁棒性
弱电网下采用电容电流反馈有源阻尼的LCL型并网逆变器改进控制策略
LCL型并网逆变器采用并网侧电流反馈有源阻尼控制策略的参数设计及Simulink仿真模型搭建
基于电网电压全前馈的有源阻尼LCL型并网逆变器加权平均电流反馈控制
PCC电压比例前馈,对采用电容电流正反馈有源阻尼+网侧电流反馈控制系统,在电网阻抗影响下的稳定性分析及Simulink仿真模型搭建(有利于系统稳定性)
LCL型并网逆变器加权平均电流(WAC)控制方案→第二期:阻尼
弱电网下LCL型并网逆变器稳定性改善方案_陷波器(2)
PCC电压比例前馈,对采用电容电流负反馈有源阻尼+机侧电流反馈控制系统,在电网阻抗影响下的稳定性分析及Simulink仿真模型搭建(劣化系统稳定性)
具有相位补偿的QPR控制器:电网电压背景谐波+等效电网阻抗对LCL滤波并网逆变器的影响
三相LCL并网逆变器机侧电流反馈PR控制造成导纳谐振频率点偏移,通过改进方案校正导纳谐振频率点,进而抑制网压背景谐波。
阻尼如何
极强的——弱电网下LCL型并网逆变器一种低频域幅值恒定的高稳定裕度改进控制策略设计及仿真模型搭建
LCL型并网逆变器在弱电网下基于电容电压负SOGI有源阻尼的控制策略设计及Simulink仿真模型搭建
PCC电压比例前馈,对LCL型并网逆变器网侧电流单环无阻尼反馈控制系统,在弱电网条件下的稳定性Simulink仿真分析(有利于系统稳定性)
滤波电容电压全前馈:二、LCL滤波并网逆变器稳定性分析(a)
MPC-VSG模型预测控制和虚拟同步机控制并网逆变器
LCL型并网逆变器采用并网侧电流单环无阻尼反馈控制策略,在电网阻抗影响下的稳定性分析
PCC电压比例前馈,对LCL型并网逆变器机侧电流单环无阻尼反馈控制系统,在弱电网条件下的稳定性Simulink仿真分析(劣化系统稳定性)
虚拟dq坐标系在单相LCL型并网逆变器无阻尼单环控制中,实现零稳态误差跟踪的Simulink仿真模型搭建