V
主页
亚马逊发布了第一款完全无人驾驶的Robotaxi:New Amazon ZOOX 无驾驶舱、全方位激光雷达,满电能跑16小时
发布人
https://mp.weixin.qq.com/s/BZ5Rjx3j32qjWWmOY6HTdA 今天,亚马逊发布了第一款完全无人驾驶的Robotaxi 亚马逊首款L4级Robotaxi亮相:无驾驶舱、全方位激光雷达,满电能跑16小时
打开封面
下载高清视频
观看高清视频
视频下载器
CNBC试乘百度无人驾驶RoboTaxi 【中英】
斯坦福团队开发智能盲杖,搭载激光雷达,可探测障碍规划路线,完全开源可在家DIY
何小鹏美国体验特斯拉FSD 称最终无人驾驶会打败99.999%的司机
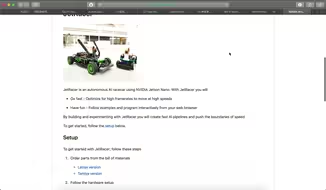
Jetson NANO使用经过TensorRT优化过后的模型每秒处理画面超过40帧超过人类反应速度,让自动驾驶更快更安全。 jetracer打破赛道测试最快圈速
真车实际路况测试Nvidia JetsonNano自动驾驶图像语义分割模型
Jetson Nano IN MEV自动驾驶平台训练一个AI 目标追踪模型
精彩的自动驾驶障碍赛2019北京市青少年科技创客活动之自动驾驶挑战赛
自动驾驶方程式赛车 基于学习的自动赛车模型预测控制
【6小时入门教程】使用Python学习高级计算机视觉 | MediaPipe OpenCV
几代智驾人的努力,在我这代终于成了|对话小马智行楼天城
3小时入门Python无人机编程课程 包含4个项目:监控无人机,人脸跟踪飞行和无人机寻线等(2021最新教程)
jetson nano 控制大疆tello 实现无人机追逐目标
【教程】计算机视觉在Arduino创客作品中的应用 | 2小时学习灯手势控制、PID 面部跟踪、角度查找器、手势控制、带有 Conyeor 皮带的颜色分类器
SLAM自动飞行 OrbSlam on the Jetson Nano
李想公开露面:自动驾驶已获突破 且不是智能驾驶也不是辅助驾驶
2024年普通人都去给我大胆做跨境电商!!做起来真的很香!
NVIDIA Jetson Nano 实现99%高精度、毫秒级延迟,AI便携式神经假肢让截肢14年患者运动自如
特斯拉FSDV12.4.1:人性化又拉高一层!但学会了坏习惯
NVIDIA开源自动驾驶方案操作教程 第一节 jetracer介绍与远程连接小车
IT男再也不担心眼「瞎」在 GitHub Universe 2020 黑暗模式正式发布!
RoboRace电动无人驾驶汽车竞赛
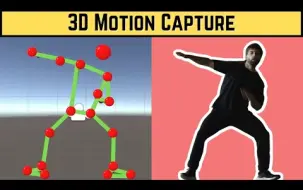
【教程】使用普通网络摄像头进行3D动作捕捉 | 计算机视觉 OpenCV
NVIDIA Deepstream 三十分钟实现基于 Python 的路况多模型推理系统
2019北京市中小学生科技创客活动MEV自动驾驶挑战赛现场实录二
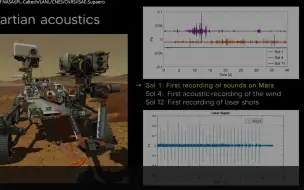
查收来自火星上的声音!火星上的风和激光射击声
激光雷达路线再否定!用最简单逻辑解释,无需因华为就认为方向正确
【教程】实时检测定位468个人脸特征点 | MediaPipe OpenCV Python | 计算机视觉
遥遥落后的纯视觉自动驾驶在无自然光环境下跑土路
AI拿「雪糕筒」没辙!Waymo自动驾驶汽车一秒「封路」!主播被困车内,竟在救援团队面前「畏罪潜逃」
2019北京市中小学生科技创客活动MEV自动驾驶挑战赛英伟达何琨老师测试现场实录
【教程】进阶篇:手势音量控制【第2部分】使用计算机视觉实现手势音量控制 | OpenCV Python 2021
【AI互相对抗赛渐入佳境】K12【MEV智能驾驶挑战】@Nvidia GTC China 2019 视频报道
【教程】使用OpenCV 实现AI 虚拟键盘 | CVZone
【教程】使用计算机视觉实现手势音量控制 | MediaPipe OpenCV Python 2021
【AI互斗人类车手渔翁得利】 【MEV智能驾驶挑战】@Nvidia GTC China 2019 视频报道
城市街道自动驾驶挑战赛
【AI开心滴跑圈】 K12【MEV智能驾驶挑战】@Nvidia GTC China 2019 视频报道
jetson Nano识别拇指方向
jetracer jetson nano 通过高速摄像可以看出AI驾驶时的行车路线细节和转弯时用尽全身力量对抗转向不足(understeer)真是个努力的AI呀
2019北京市科技创客活动MEV人工智能自动驾驶挑战赛 看109中欢乐的漂移加蛇形走位