V
主页
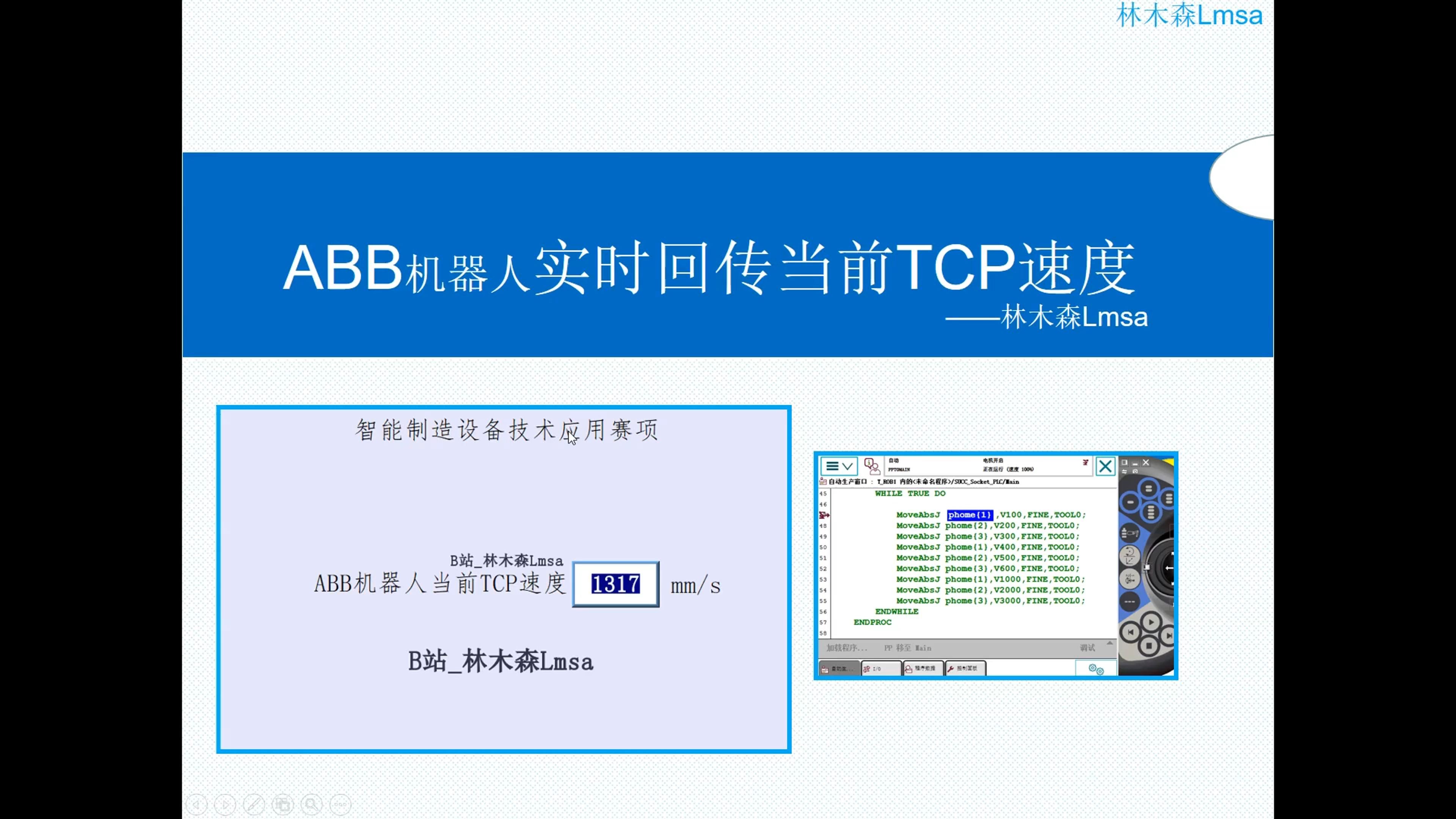
ABB机器人实时回传当前TCP线速度给PLC
发布人
ABB机器人实时回传当前TCP线速度到PLC TCP Speed
打开封面
下载高清视频
观看高清视频
视频下载器
ABB机器人发送当前坐标位置给PLC详细讲解
ABB机器人与S7-1500PLC的Socket通信实操带练
ABB机器人与S7-1500PLC的Socket通信讲解
威纶通HMI实时显示ABB机器人当前位置
FANUC机器人发送位置给PLC
国赛机电一体化赛项,四站机器人新题标签整理排序完整版。
FANUC机器人ModbusTcp通讯_PLC端程序编写
机器人技术应用_基础码垛
只要牢记掌握这个方法,画电路图、看电路图就简单了
详解TCP/UDP通讯协议的特点及如何选用
FANUC机器人ModbusTcp通讯讲解
PLC编程核心秘诀,直接套用此方法快速做项目3(价值巨大)
ABB机器人常量、变量、可变量的区别
智控教育,ABB工业机器人课程介绍
FANUC机器人PNS自动运行通俗讲解
工业机器人如何示教点位,零基础学习工业机器人
协调的ABB机器人运动
操作系统内核-TCP-高并发-调优实战-三次握手-宕机场景
搞机器人自动化设备的兄弟如果觉得自己所从事的行业太卷,来看看缝纫机就会发现末端负载20公斤四轴全伺服的机器人整机13800还是太贵了…
FANUC机器人ModbusTcp通讯配置
可二十多岁的我要跟谁交代呢,有一天你看错了我,下一次还是看错我
FANUC(发那科)机器人实用小技巧,示教器的开关控制(UOP)专用外部信号启用和禁用
嵌入式面试八股文第31天(TCP和UDP的区别)
机器人自动化行业的销售是浅薄的全面,专业知识懂一半行业知识全知道,而技术是深刻的片面…
#工业自动化 #tcp TCP/IP
B站最通俗易懂的TCP/IP协议教程!思路分析到代码演示,手把手教你学会协议!【马士兵教育】
运动控制与数字孪生
中国人形机器人发展现状!憋住不要笑!
2024年职业院校技能大赛全新改革
认识ABB机器人示教器,手把手教你学会abb机器人示教器编程
2分钟了解数字量、模拟量、开关量的区别
2024最新C++网络开发教程,涵盖tcp、udp、epoll、网络协议栈、dpdk等,通俗易懂,学完即可就业!
只要你掌握了核心技术跟供应链,你就会发现四关节机器人的成本真的可以比立柱机械手更低…
工业机器人如何校准,零基础学习工业机器人
Modbus中TCP和RTU的区别
熟粪施肥原则:非标的东西标准化,标准的东西非标化
机械臂启动,已经很稳不抖了哈哈哈
末端负载50公斤以内的两到七轴我们差不多应该算是可以和川崎那智现代机器人硬刚了…
在结构性的成本跟技术优势的加持下,我们能把末端负载10公斤五轴全伺服的机器人整机硬卷到9999而且只微亏还能贴牌…
东华大学机械本硕生,在单位工作的薪资情况。