V
主页
【ICRA 2022】复杂非结构化场景中多车协同轨迹规划方法
发布人
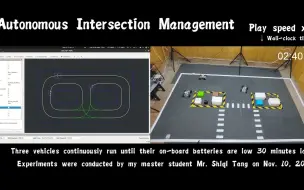
Multiple Vehicle Trajectory Planning in a Nonconvex and Cluttered Environment: Benchmarks, Methodology, and Experiments. by Yakun Ouyang, Bai Li, Youmin Zhang, et al. Accepted on Jan. 31, 2022 by ICRA 2022.
打开封面
下载高清视频
观看高清视频
视频下载器
非结构化场景中智能车集群实时集中式协同轨迹规划
《智能网联汽车协同决策与规划》第五章仿真实验结果
湖南大学李柏教授自动驾驶决策规划课题组2022-2023年度研究成果总结
【T-SMC】无信号灯无车道自由路口场景中的协同轨迹规划
【ICRA 2021】Lane-free Autonomous Intersection Management
《智能网联汽车协同决策与规划技术》李柏 葛雨明 著(机械工业出版社2020)
《智能网联汽车协同决策与规划》第三章仿真实验结果
湖南大学李柏教授自动驾驶决策规划课题组近年研究成果(2015-2021)
《智能网联汽车协同决策与规划》第四章仿真实验结果
《智能网联汽车协同决策与规划》第二章仿真实验结果
多叉车协同速度规划
【T-IV】Tractor-Trailer Vehicle Trajectory Planning in Narrow Environments
【这里免费领取】什么?2024大学生职业生涯规划书可直接抄无需修改,极速完成!各个专业都有,最近整理更新完毕
【T-IV】Online Parking Trajectory Replanning for Sudden Environmental Changes
后悔没有早点学会PS抠图 !2024最详细的PS抠图方法大全,掌握这一套,轻松解决99%的抠图难题!新手教程/通道抠图/蒙版抠图
【RA-L】Tractor-trailer Vehicle Maneuver Planning in a Curvy Tunnel
【233】前成人片女演员的成长历程
【PR教程】清华大佬花费198小时精讲的视频剪辑教程,手把手带你从零开始学剪辑(新手入门实用版2024)
一个能让你机械设计水平快速成长的偏方!打败99%的教程!
自动驾驶车辆园区测试
青少年瑜伽训练2
SolidWorks如何在圆柱面上进行打孔?这个两种方法你一定要学会!
给大学计算机学生的血泪建议,你可以不随波逐流,但不能一无所知!!
【RA-L】Optimal Cooperative Maneuver Planning for Multiple Nonholonomic Robots
【IFAC 2020】 On-road Trajectory Planning in the Cartesian Frame
给大一计算机新生的血泪建议,看完这个视频,将会对你大学四年产生巨大的影响!
小镇做题家如何自救:社会化是唯一出路
教育中的差距会有多大? 在教育最卷的地方我靠着努力和自驱走进了北大校园~
明明学的计算机,但宿舍6人,却没一个敲代码的
你努力的目标是什么?
学会UV原理,法线烘焙不再是事~
清华杰出少年数学示范班:一将功成万骨枯
真的笑不活了,区区二本也敢来面试腾讯、阿里这些大厂,校招做不到这些,洗洗睡吧!
【全368集】B站2024最细自学PS/AI/CDR全套教程,设计技术爆涨!!别再走弯路了,逼自己一个月学完,从0基础小白到PS大神只要这套就够了!
顶级自律从不靠任何意志力,而在于「平静如水的野心」
【PR教程】(全268集)B站最系统的剪辑教程,全程干货,通俗易懂,手把手带小白从零开始学视频剪辑(2024新手入门实用版)
【全748集】强推!2024最细自学PR+AE全套教程,看完就会影视后期!别再走弯路了,从0基础小白到视频剪辑大神只要这套就够了!
【张雪峰】能听进去这段话,离成功便不远了
曾教授:如何判断一个人是不是真心对你?你只需观察这一点就够
【PR教程】100集(全)从零开始学PR软件基础(2024新手入门实用版)PR2024零基础入门教程!!!