V
主页
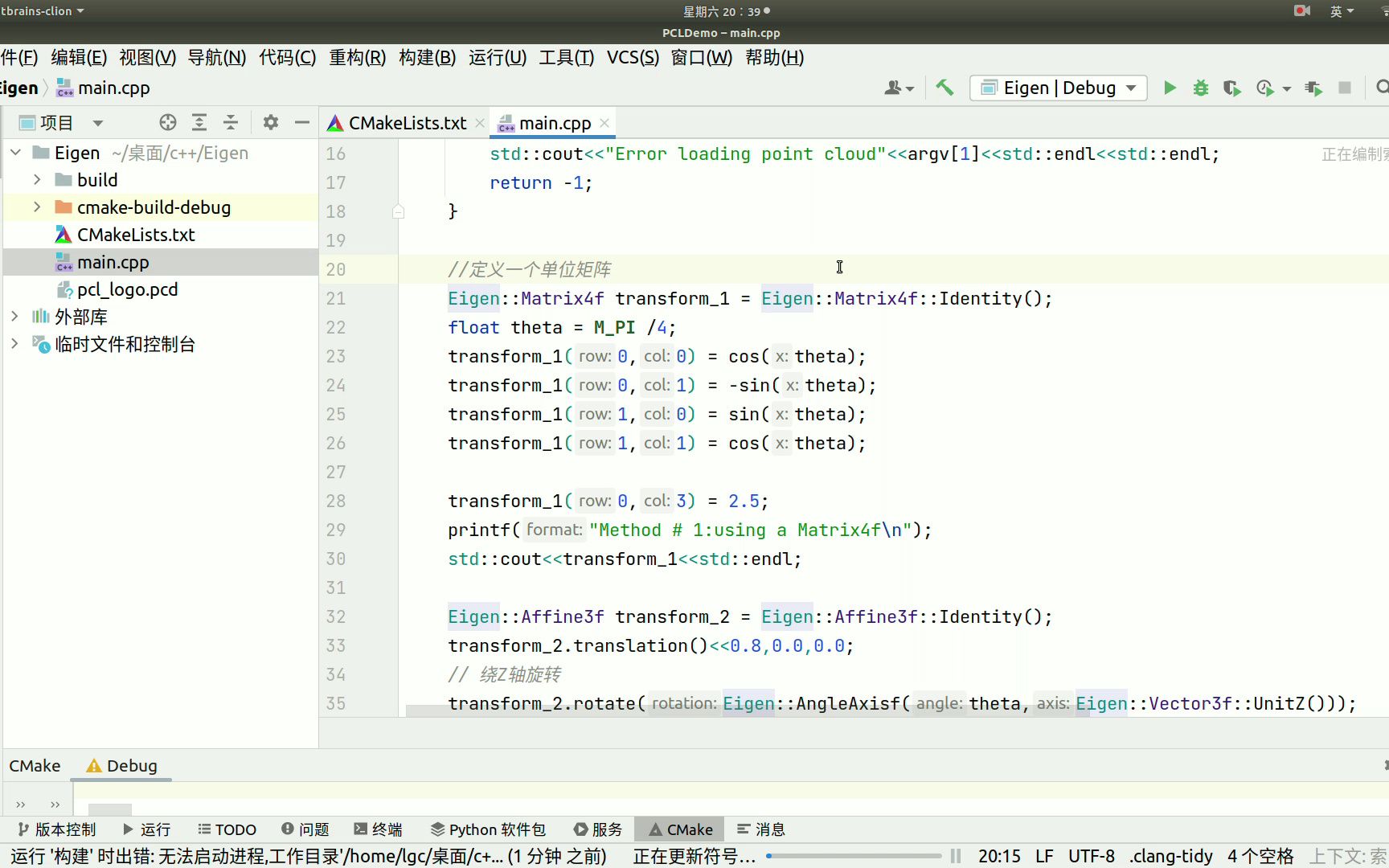
Eigen和Clion的基本用法
发布人
Eigen的基本用法 CSDN地址:https://mp.csdn.net/mp_blog/creation/success/132124682
打开封面
下载高清视频
观看高清视频
视频下载器
百度千帆大模型平台的用法
Cmake的基本用法
cmake基本用法
TodoTree的基本用法
DeepSort代码理解
ChatGLM6B-int4的用法
build_targets的理解
星火大模型API和微调大模型
loss的理解
yolov5+DeepSort框架理解
ICP迭代最近点算法
rplidarA1的使用方法
卡尔曼滤波的调包用法
yolox的运行方法
lidar2camera自动标定直观认识
git单人操作
Pytorch钩子函数的用法
moveit+cpp
OpenCalib中lidar2imu标定
import语法使用
魔搭和huggingface的用法
yolov5剪枝+tensorRT部署
01-ROS1.0-melodic安装教程
OpenCalib中lidar2lidar标定
CNN+Pooling
detect文件的讲解
astraproplus采图演示
OpenCalib手动点云和相机的标定
腾讯云API的调用
BEVFusion+BEVFormer
vscode调试roslaunch
L1 L2正则化
C++部署
OpenCalib中Radar2lidar标定
OpenCalib中Radar2Camera标定
Prompt写法示例
PCL法向量估计的三种方法
NMS的原理介绍
vscode调试普通C++工程脱离.vscode
Linux下环境的安装