V
主页
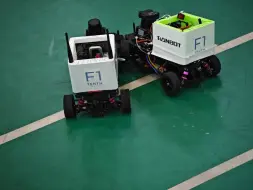
RTK履带无人车户外曲线路径跟踪(精度3cm内)
发布人
自主研发的履带式无人车低速自动导航驾驶系统,可实现直线、曲线路径高精度厘米级跟踪行驶。 欢迎咨询洽谈q:532501762
打开封面
下载高清视频
观看高清视频
视频下载器
无人机+机器狗+无人车都给老挝军队看了
智能无人系统应用挑战赛 F1TENTH 无人车竞速赛,开赛前,现场做车,现场焊接,现场写代码,完整跑完全场赛道,车辆还可以和其他队伍手拉手,西交利物浦太强了
一趟更比三趟强!
ROS SLAM小车
进来体验高科技!萝卜快跑无人车第一视角&SR界面
木质坦克履带,跑起来了
早期武警实验AMA-1无人侦查车实录(
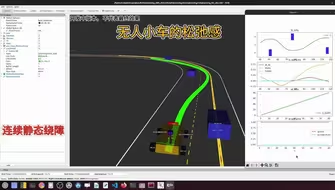
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
摆臂履带机器人,科研项目研发集成
机器人公司终于来了位00后运营,领导非常放心,大家觉得怎么样?
无人控制无人:机器人异地遥控无人车追击目标实拍
采用非线性优化的单点RTK与IMU的融合定位
你是干啥得?RTK,全站仪,经纬仪,水准仪,无人机等等.........................
专业定制1-6000W可调功率定制轴向
橡胶履带底盘智能机器人履带底盘全地形多用途通用机器人履带底盘
坦克履带实时物理模拟Unity
百度萝卜快跑后续事件来了!!!反转
履带动画测试
路径跟踪 | 最优控制LQR算法实现(ROS C++/Python/Matlab)
你有没有想过,未来某一天自己的工作会被无人车,无人机给取代?
SLAM算法(浙软夏令营)废柴大学生的所作所为
T34-85履带改进
第四期智能无人车线下实训精彩回顾,可在深蓝学院官网获取相关课程信息
第三集——RTK使用说明-点校正
百度萝卜快跑引发失业恐慌?真相未必是你想得那样
【4K】无人网约车初体验!深圳坪山萝卜快跑无人车司机视角一镜到底!(结尾有速度对比)
重磅!把机械臂价格打下来!手搓成本仅5K的六轴达妙机械臂!【DIY乐趣】
图纸怎样导进华测rtk
2000坐标系需要做参数计算吗?
钟明轩在旧金山第一次体验无人车,总之就是:吓死老娘了!
三体水滴,大道至简,简单是最大的高级
模型新人的第一个坦克(因为履带做破防了)
出租车、网约车要变天?萝卜快跑无人车要改变传统打车方式?
无人机自主穿环实验(3.5寸飞机首飞成功)
業界初!マイクロPC-01Eデモ機を大公開【KOMATSU世界最小ユンボ】
空地协同多机器人系统!!空地协同机器人系统:空地协同定位与地图构建、多传感器信息融合研究、空地编队研究、空地协同机器人的动态追捕等
机械臂协调控制复现
丝滑的威骏双销履带
使用相机在ROS下的TensorRT量化推理yolo模型目标检测部署
2024年TI杯全国大学生电子设计大赛 宽度小于15cm的R3X轮式小车配合惯导走直线效果演示与代码开源