V
主页
课程三:电动与气动机械爪控制与搬运
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
课程四:基于拖动示教的机械臂路径规划控制
课程五:物料分拣传送带控制参数调试
STEP 2:皮影戏机器人—机械爪装配
课程六:物料循环检测平台控制调试
足球机器人软件培训(修改lua脚本)
课程一:手眼标定
智能制造—物料激光雕刻搬运码垛场景
课程八:图形化编程物料识别与分拣
课程七:轴/套的检测、分拣与装配
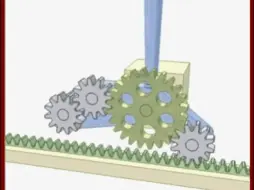
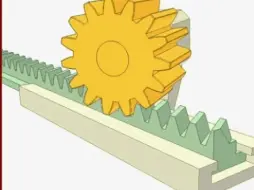
齿轮齿条3
创非凡QC-8KTGXII 电机模组与麦轮装配
齿轮齿条2
螺杆传动
足球机器人软件培训(前期设置)
足球机器人软件培训(比赛模式)
齿轮齿条1
足球机器人比赛强队分享3
iLoboke足球机器人第一轮培训-规则解读
STEP 1:皮影戏机器人—机械臂装配
创非凡QC-8KTGXII 底盘循迹模块布线
锥齿轮传动1
足球机器人软件培训(仿真功能)
圆柱斜齿轮2
足球机器人软件培训(脚本导入)
足球机器人第三轮培训~远程软硬件联调
足球机器人软件(单机控制)
足球机器人软件培训(添加dll并演示仿真)
创非凡QC-8KT机械爪装配③
创非凡QC-8KT机械手舵机模组装配①
足球机器人比赛强队分享2
创非凡QC-9KT实用场景1(自动加工系统)
螺杆传动1
齿轮齿条
创非凡8KTGXII二级连杆臂装配
锥齿轮传动
创非凡QC-8KT-舵机模组与机械臂装配②
智能制造—PCB涂胶装配场景
齿轮齿条4
创非凡QC-8KTGXII 底盘承载平台装配-
足球机器人比赛强队分享1