V
主页
京东 11.11 红包
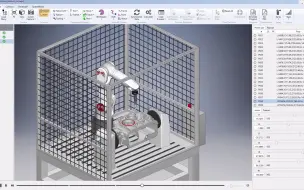
信捷运动控制综合实训平台组成介绍
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
信捷PLC通讯连接与软件基本操作
信捷运动控制实训平台上电操作
流程控制指令-if条件判断指令及应用
信捷变频器外部接口与面板讲解
机器人与相机通讯设置
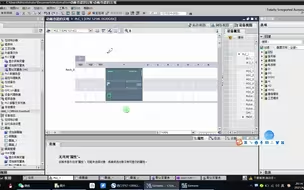
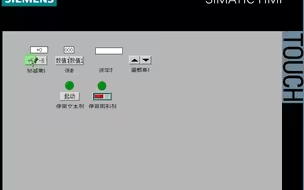
12.2进阶版电机正反转控制PLC与HMI设计综合应用案例
单键控制启停编程调试——脉冲指令与FB块
快换和气爪气路的连接——工业机器人操作与运维
ABB Robotstudio和robotware的安装
流程控制指令-TEST指令及应用
HMI、PLC和机器人通讯综合应用_3机器人部分编程
PLC与ABB机器人IO通讯综合应用_2PLC和HMI编程
大国工匠-李刚_盾构"刀手"
西门子200smart编程-红绿灯控制案例_定时器和比较指令的应用
ABB机器人与西门子PLC通讯综合应用——双工位装配(test指令和组信号应用)
9.1棒图组态
工业机器人操作与运维_空压机的基本操作
单按钮控制启停PLC与HMI编程仿真调
机器视觉_形状识别
5.3触摸屏案例1:小车直线运动_仿真调试
运动控制技术——参数设置操作
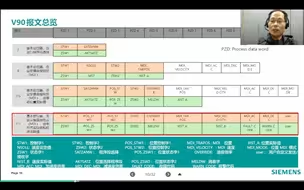
1.4 S7-1500运动控制 V90伺服驱动器常用报文详解
工业机器人集成应用_伺服轴配置
相机与机器人socket通讯程序现场调试讲解
10.2报警组态_模拟量报警
robotmaster软件介绍
5.2触摸屏案例1:小车直线运动PLC编程
4.9 S7-1500运动控制 凸轮同步功能配置
4.1按钮组态任务介绍
涂胶站编程调试P2人机交互与CASE指令应用
工业机器人操作与运维_相机光源开关控制PLC组态和编程
博图软件安装
nodejs、node-red及第三方库的安装
PLC与ABB机器人IO通讯综合应用_2PLC和HMI编程
11.3用户管理_综合应用
大国工匠·创造力罗昭强:勇于创新的高铁调试工人
11.2用户管理_增加用户和分配权限
欧姆龙视觉:形状搜索II
工业机器人集成应用_第7轴相关IO配置功能测试
PLC和机器人通讯综合应用_1任务分析