V
主页
UImessage事件订阅--基于PC SDK
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
控制器的事件订阅--基于PC SDK
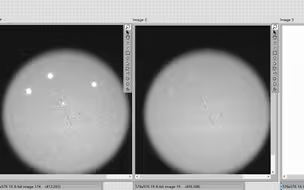
灰度直方图的分析--LabVIEW Vision
数据变化事件订阅--基于PC SDK
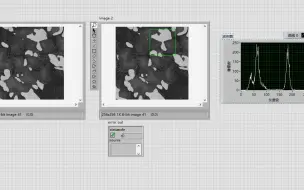
对ROI区域的灰度分析--LabVIEW Vision
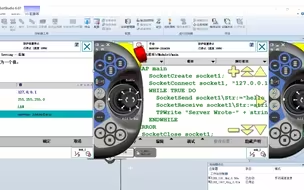
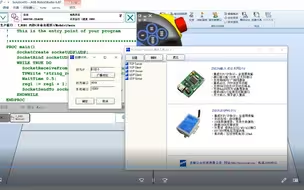
机器人套接字(Socket)通信 (1) --创建Client端
上位机写入机器人IO信号--基于PC SDK
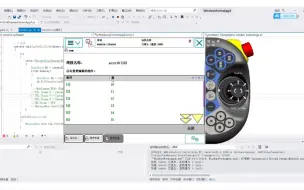
机器人套接字(Socket)通信(2)--Server端的建立
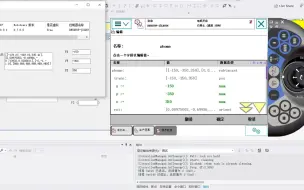
PC应用程序读写机器人Controller数组方式--基于PC SDK
外部软件控制程序启动及停止--基于PC SDK
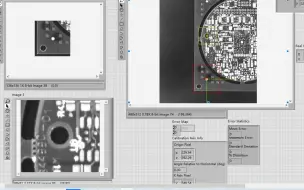
图像校正的过程示例--LabVIEW Vision
机械人视觉抓取程序编写(3)--坐标数据字符串的解析
机器人实时位置的获取--基于PC SDK
PC应用程序如何读取机器人IO信号--基于PC SDK
显示任务内的所有数据方法--基于PC SDK
通过PC程序写入机器人数据--基于PC SDK
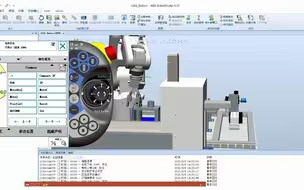
机器人实操与编程(10)--码垛上料程序编写
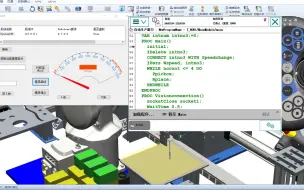
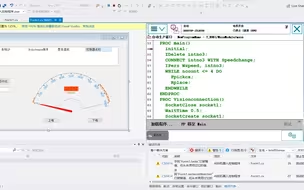
外部应用改变机器人TCP最大速度--基于PC SDK
灰度直方图均衡化及累计结果--LabVIEW Vision
外部程序对TCP速度监控--基于PC SDK
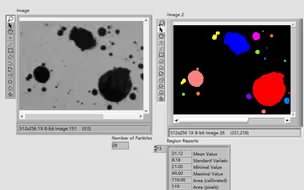
二值化标记实例--LabVIEW Vision
机械人视觉抓取程序编写(2)--坐标数据的获取
机器人实操与编程(9)--码垛项目编程
AVI文件的读取--LabVIEW Vision
机器人通信补充--Socket通信使用UDP协议
外部应用控制机器人上下电--基于PC SDK
机器人套接字(Socket)通信(4)--客户端接收400个数据
机械人视觉抓取程序编写(5)--机器人执行抓取动作
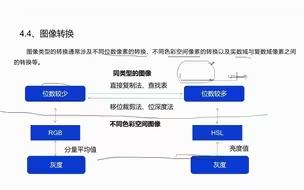
图像转换IMAQ Cast Image VI 介绍-LabVIEW Vision
PC程序与机器人系统连接--基于PC SDK
机器人实操与编程(7)--程序编写与调试
简易外部事件捕捉器--LabVIEW Vision
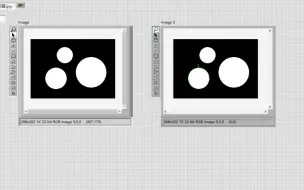
图像相减和绝对差--LabVIEW Vision
机器人实操与编程(13)--码垛形式编程的最后一节课
机器人套接字(Socket)通信(5)--字符串类型数据解析
转换ROI方法对比--LabVIEW Vision
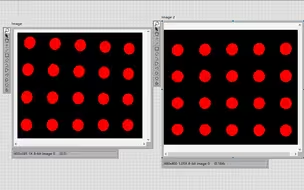
图像模式匹配及定位--LabVIEW Vision
先“抓”后“拍”的实现--修正TCP坐标方法
透视畸变校正的演示--LabVIEW Vision
程序指针选择设置--基于PC SDK
机器人实操与编程(3)--六点法建立TCP坐标