V
主页
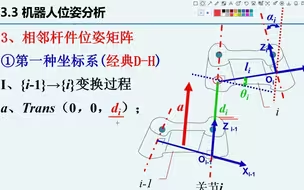
机器人 运动学 D-H方法 坐标轴确定
发布人
机器人 运动学 D-H方法 坐标轴确定
打开封面
下载高清视频
观看高清视频
视频下载器
机器人 运动学 D-H经典方法和改进D-H方法参数表建立
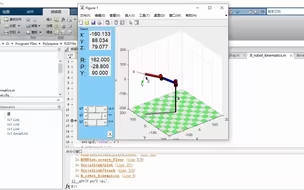
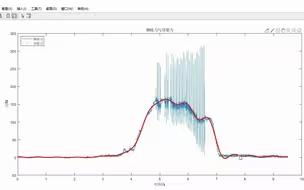
matlab 机器人 运动学 正逆运动学 轨迹规划 出图
机器人 运动学 基础 经典DH变换
matlab robotics toolbox 安装设置
matlab 机器人学 运动学 旋转 平移 复合变换 齐次变换
1peter corke 机器人学 基础 齐次变换矩阵
9-1机器人动力学MATLAB分析基础动力学方程inertia函数分析惯性项的影响
机器人 运动学基础 旋转变换 欧拉角 固定角 matlab 实现
机器人学 旋转变换 固定角 rpy2tr 运动学基础
2-2 peter corke 机器人学 基础 齐次变换矩阵
物理差?看它!动态平衡白捡6分,四大方法助你成功解决动态平衡的所有难题!【高考物理晴姐】
9-1机器人动力学MATLAB分析基础动力学方程rne函数
学而思大白本 数学思维 二年级第一讲9-1
机器人 动力学 基础 质量分布 惯性张量
机器人 牛顿欧拉递推 基础 速度分析1
无生试讲表现力
学而思 数学思维 二年级 第二讲 第4题
机器人 动力学分析基础 质量分布 惯性张量矩阵
学而思 数学思维 大通关 第一讲 第10题
机器人 动力学分析 牛顿欧拉递推法 基础 速度分析2
数学思维 学而思 大白本 小学三年级 1.5
小学数学 数学思维 鸡兔同笼 二年级
古文观止 郑伯克段于鄢 左传
数学思维 小学数学 栽树啦
小学数学 数学思维 三年级 学而思 大白本 1-6
MATLAB 傅里叶变换 傅里叶滤波
新老师,但凡多长一点点心眼,工作上都会顺很多,我这6点建议,你可以了解一下
学而思 数学思维 大通关二年级第一讲9-2
古文观止 左传 子产论政宽猛
小学数学,数学思维,学而思 还原法
机器人 动力学分析 牛顿欧拉递推法 基础 速度分析 3
2025高考政治90➕,方法对了,事半功倍,扎实提升,实现目标,本科研究生双985,十六年高考政治教学名师助你高考必胜!赢在2025!——郑关飞
古文观止 左传 蹇叔哭师
数学思维二年级小学数学排队问题
学而思 数学思维 大通关 第二讲第二题
【地理研学】沉浸式了解什么是丹霞地貌,超详细讲解~
古文观止 国语 鲁语上 展禽论祀爰居 田田学习 上
【2024二十届三中全会】时政热点解读+考法预测-2025王军涛时政热点串讲国考省考事考必学
学而思 数学思维 二年级 第一讲 16
小学数学 数学思维 学而思 二年级 还原倒推法