V
主页
京东 11.11 红包
GO-SLAM:Global Optimization for Consistent 3D Instant Reconstruction
发布人
https://www.youtube.com/watch?v=MbGn94Y4l8Y
打开封面
下载高清视频
观看高清视频
视频下载器
NeRF-VINS:A Real-time Neural Radiance Field Map-based Visual-InertialNavigation
Gaussian Splatting SLAM
ICRA 2024 Presentation (PL-EVIO)
(激光雷达实时三维重建)ImMesh Testing using hku_main_building
Gaussian-SLAM Photo-realistic Dense SLAM with Gaussian Splatting
LiDAR-NeRF:Novel LiDAR View Synthesis via Neural Radiance Fields
Gaussian-SLAM testing tum
IROS24:BE-SLAM: BEV-Enhanced Dynamic Semantic SLAM with Static Object Reconstruc
基于intel realsense l515激光相机的rtabmap
FAST-LIVO测试之—LiDAR_Degenerate
DOM-60 为机器人带来前所未有的感知能力
DPVO testing 0493
SplaTAM Testing using TUM-Dataset freiburg1_room_seed0(训练过程可视化)
LONER:LiDAR Only Neural Representations for Real-Time SLAM
SplaTAM Testing using TUM-Dataset freiburg1_xyz_seed0(最终结果可视化,这个UI不是一般的难用)
Multi-sensor fusion for VLP-SLAM localization and navigation
ECMD:An Event-Centric Multisensory Driving Dataset for SLAM
基于nsh_indoor_outdoor数据集的A-LOAM复现(3D LiDAR SLAM)
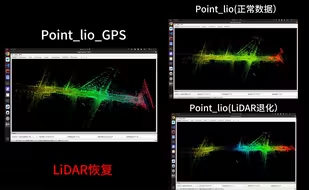
Point_lio_gps解决LiDAR退化导致的里程计漂移。
Simulation for ORB-SLAM
two_turtlebot2_LiDAR-SLAM_cartographer
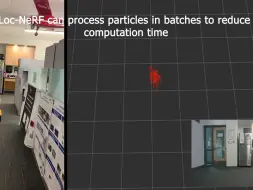
Loc-NeRF:Monte Carlo Localization using Neural Radiance Fields
DROID-SLAM:Deep Visual SLAM for Monocular, Stereo and RGB-D Cameras
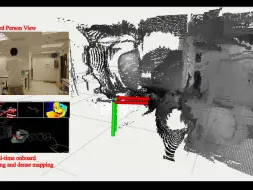
Global Mapping Evaluation of EVI-SAM (screen shot of the onboard NUC)
IROS 2022 —— 基于事件相机的单目视觉惯性里程计 / Event-based Monocular Visual Inertial Odometry
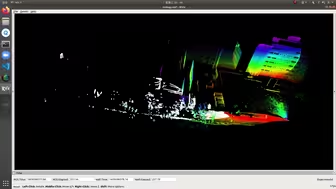
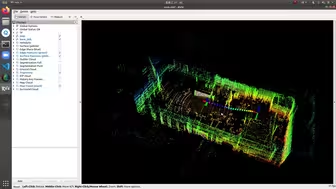
global_mappping_video3
mono_event_camera_SLAM_try1
基于两个turtlebot2的多机器人SLAM地图融合
LIO-VoxelMap testing using hkust_campus_seq_01
ImMesh Testing using hku_campus_seq_00
PV-LIO (VoxelMap) testing using
envio_testing3
instant-ngp testing 10 FPS
基于HKUST数据集的LOAM_livox复现V2(3D LiDAR SLAM)
基于nsh_indoor_outdoor数据集的LeGO-LOAM复现(3D LiDAR SLAM)
(experiment) single turtlebot3 robot slam based on rrt_exploration package
DVI-SLAM测试IMG_0495
Survey for 3D Reconstruction using Event Camera
single kobuki robot slam based on rrt_exploration package
SplaTAM Testing using TUM-Dataset freiburg1_desk_seed0(训练过程可视化)