V
主页
京东 11.11 红包
咸鱼之王国际服不玩了找个有缘人送了—— 一键三连主页动态专栏领取!!
发布人
咸鱼之王国际服不玩了找个有缘人送了—— 一键三连主页动态专栏领取!!
打开封面
下载高清视频
观看高清视频
视频下载器
[SIGCOMM2023] : Offloading
GB200 NVL72s
凸集图及在最优控制和运动规划中应用
[RLC 2024] Peter Stone,实用强化学习:30 年研究的经验教训
通用医学图像分割
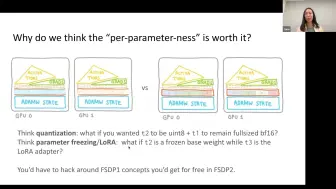
Slaying OOMs with PyTorch FSDP and torchao
EI Seminar:如何打造通用机器人
[APNEET2023] 超大规模RDMA:经验和未来方向
Stanford CS149 并行计算,GPU架构和CUDA编程 7
KAN神经网络
ICML2024 Tutorial,Machine Learning on Function spaces
Seminar in Computer Architecture 2024,计算机架构和硬件安全的未来 2
通过扩散策略进行机器人灵活操作
Stanford CS149 并行计算,Transactional Memory 16
[NSDI2023] Gemel: 边缘端基于模型合并方法的内存高效,实时视频分析
Learning Abstractions from Humans
Groq LPU
基于Epigraph Form和DRL的Stabilize-Avoid最优控制算法
【时间序列分析】AR过程(Auto Regression)自回归过程
Stanford EE259 惯性传感器:加速度计的工作原理与架构
GRASP on Robotics:波斯顿动力AI
[CVPR24 Vision Foundation Model Tutorial] 具有精细落地能力的LMMs
Stanford CS149 并行计算,Hardware Specialization 18
SIGIR 2024,信息检索发展历程
LLMs:教编程的新方式
主动和可解释家用机器人设计
[Stanford MLSys] 通过k-bit量化大众化基础模型
边缘AI
Naval对于AI创业的思考
RISC-V Microprocessors
Dynamics on Neural Networks
DéjàVu: 稀疏上下文的高效LLM推理服务
金融市场中生成式AI和多模态agents应用
State of AI 2023
ASPLOS2024上LLM推理服务优化分享
Efficient Large Vision Models
[Stanford Seminar] 设计下一代自动驾驶技术栈架构
一种结构化方法来实现机器人学习泛化
贝叶斯思维大脑
学习可变形物体操作的长期双手动任务