V
主页
17 修正错误控制点设站或者内业控制点匹配错误的问题—徕卡内业数据统一处理软件 infinity
发布人
检查观测结果与控制站坐标是否吻合。这是对 RTK 基站设置以及移动测量的一个很好的检查。
打开封面
下载高清视频
观看高清视频
视频下载器
基线终于开始正式处理-—28 徕卡数据处理软件 infinity
新建坐标系统 ——20 徕卡内业数据统一处理软件 infinity
19 电离层多路径人为等多种干扰因素下复核的重要性—徕卡内业数据处理软件 infinity
徕卡内业数据统一处理软件 infinity 3——数据查看
设置基线处理参数-—27 徕卡数据处理软件 infinity
5—点云分类城市DEM提取以及一些点云分类的小建议—LiDAR360激光雷达点云数据处理分析软件
GlobalMapper 9 —提取地形特征线
现有控制点进行GNSS静态观测创建本地坐标系统-—23徕卡内业数据统一处理软件 infinity
16 验证检查测量以及移动坐标系是否正确—徕卡内业数据统一处理软件 infinity
1——点云重采样和什么是八叉树——LiDAR360激光雷达点云数据处理分析软件
CloudCompare点云网格处理软件 7——点云网格对齐
三种排除卫星方法提高基线质量---=33 徕卡数据处理软件 infinity
徕卡Leica Cyclone 3DR点云建模软件2—山区航测点云地面点DEM提取
2000坐标系需要做参数计算吗?
7——点云平滑——LiDAR360激光雷达点云数据处理分析软件
GlobalMapper 6—生成等高线以及等高线的修改完善
徕卡 Leica Cyclone 3DR 点云建模软件 1.1——补充一些3DReshaper和3DR的区别
CloudCompare点云网格处理软件 19—网格表面积体积测量
4——点云地面点DEM分类提取——LiDAR360激光雷达点云数据处理分析软件
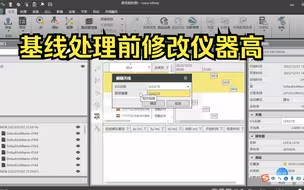
基线处理前修改仪器高也很重要-—25 徕卡数据处理软件 infinity
10——点云生成等高线——LiDAR360激光雷达点云数据处理分析软件
26——根据优化后的种子点进行单木分割——LiDAR360激光雷达点云数据处理分析软件
徕卡内业数据统一处理软件 infinity 11——GS18I图像 内业自动点测量
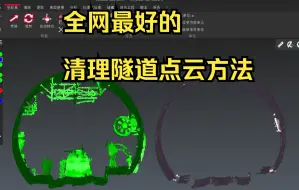
徕卡Leica Cyclone 3DR点云建模软件2—清理隧道点云(全网最简单最有效的方法)
第一集——RTK使用说明-新建工程及坐标系
基线导出以及简单说一下市面上的平差软件有哪些(修)—36 徕卡数据处理软件 infinity
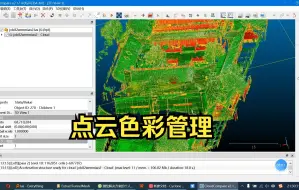
CloudCompare点云网格处理软件 16—色阶管理器
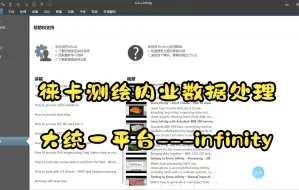
徕卡内业数据处理大统一平台——Leica Infinity简介
徕卡内业数据统一处理软件 infinity 14—GS18I图像生成点云(测量二里头古墓)
CloudCompare点云网格处理软件 15——只是告知大家有去噪滤波的模块
那些无效静态数据可以删除-—26 徕卡数据处理软件 infinity
3——点云噪声滤波——LiDAR360激光雷达点云数据处理分析软件
CloudCompare点云网格处理软件 12—创建各种模型
18 修改高程问题—徕卡内业数据处理软件 infinity
CloudCompare点云网格处理软件 21—平滑网格
找出影响基线质量的源头-—31 徕卡数据处理软件 infinity
CloudCompare点云网格处理软件 22—残缺点云球体拟合
20——地基林业特有的地面点分类改进方法——地面点滤波——LiDAR360激光雷达点云数据处理分析软件
17——专业模式和傻瓜模式——LiDAR360激光雷达点云数据处理分析软件
CloudCompare点云网格处理软件 24—点云曲率