V
主页
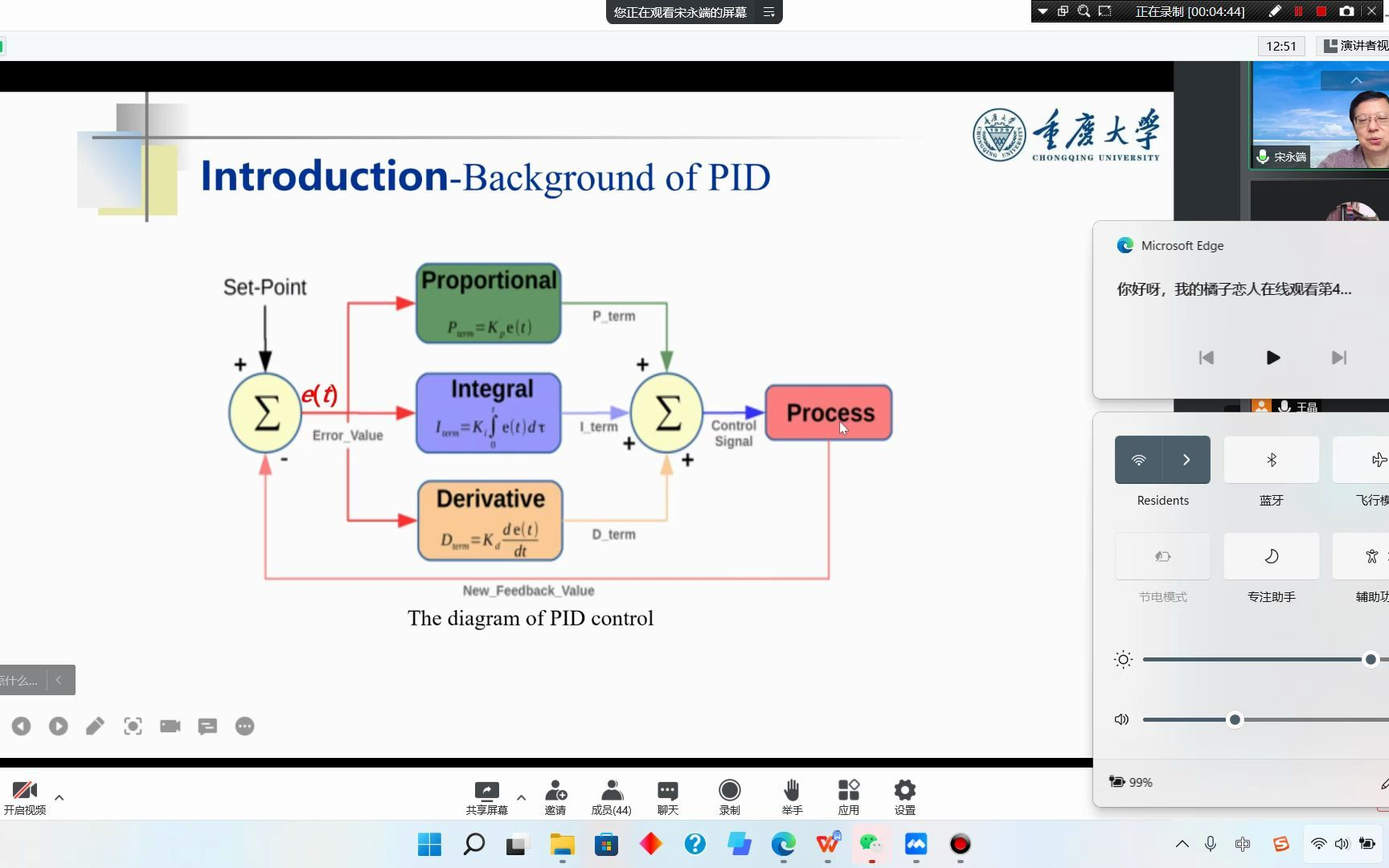
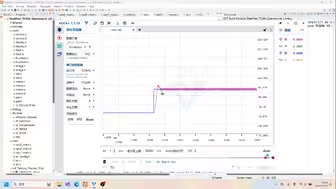
重庆大学 宋永端 PID控制的鲁棒自适应容错功能-兼谈普适性问题(北方工大邀请)
发布人
仅仅作为学习使用,欢迎一键三连
打开封面
下载高清视频
观看高清视频
视频下载器
不确定领航系统的自适应分布式观测器及其应用 香港中文大学黄捷教授
辽宁工业大学 张赛 基于估计的耦合弦系统自适应约束控制
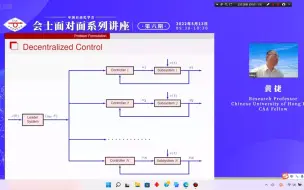
陈关荣教授讲座部分内容
山西大学 关燕鹏 Structured Controller Design for Interconnected Systems via Nonlinearmm
湖南工业大学 曾红兵 A looped functional method to design state feedback controllers
一阶倒立摆模糊PID控制与传统PID控制对比Simulink仿真系统设计
控制理论基础 - 第19-20课时 - 系统的串联校正-为什么要做校正,超前校正、滞后校正、超前-滞后校正到底应该如何设计?PID与积分-超前滞后校正的相似性
2024控制理论基础-25-26学时:PID串讲到自抗扰控制(原理、仿真),为什么用积分串联型,什么是ESO,怎么估计的扰动,模型信息怎么用?
山东科技大学 郭继跃 Finite-horizon l2-l∞ state estimation for networked systems under mix
电子科技大学 王雅 欺骗攻击下基于信任评估的传感器网络分布式定位算法
浙江大学 程鹏detecting and localizing PLC Intrusions Using Control Invariants
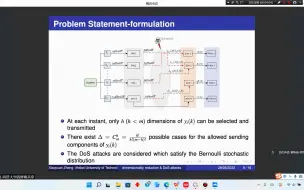
同济大学 杨昕迪 Distributed dimensionality reduction filtering for CPSs under DOS攻击
苏州大学 王光辉
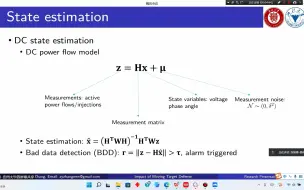
贵州大学 张镇勇 Impact Analysis of Moving Target Defense on the Frequency Stability in
安徽工程大学 谭海龙 全双工中继网络中具有自干扰的非线性系统的递推滤波
如何使用PID实现电机闭环控制
PID控制器设计
电子科技大学 李维豪博士 Dynamic target enclosing control scheme for multi-agent systems via
北方工业大学金鼎园研究生公寓
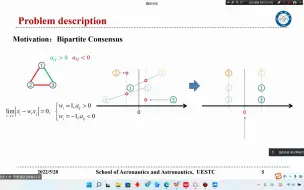
厦门大学 马骥 Distributed Nash Equilibrium seeking Over Random Graph
CSS网格自适应必备:底行居中,轻松掌握
四足机器人ROS PID控制原理讲解
「精校熟肉」Optimal Control-最优控制 (CMU 16-745) 2024-L13-处理三维旋转问题
电控组第一次培训
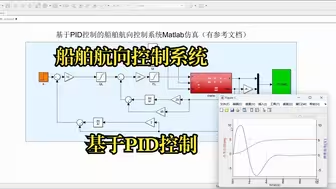
基于PID控制的船舶航向控制系统Matlab仿真(有参考文档)
基于Arduino的智能小车
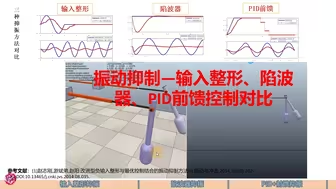
振动抑制—输入整形、陷波器、PID前馈控制对比
【DC/DC】P2:基于模型的 DC-DC 转换器控制算法调参与硬件部署
三菱放卷,用pid调节 伺服控制
华东理工大学 严怀成研究成果分享(仅仅作为知识用途)
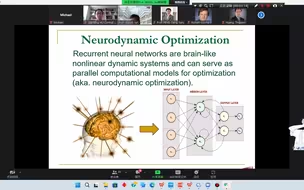
Deal with an Increasing Number of Objectives in Optimization
7.2无人机PID参数调试
复活19届ccd,浅調个角度环
控制理论基础:21-22学时-根据希望频率特性设计控制器(理想二阶模型和高阶模型) & PID控制器(续)-真正自动控制原理落地应用的章节;高频低增益低频高增益
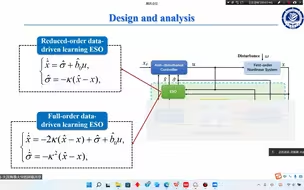
大连海事大学 吕旻高 Data-Driven Learning Extended State Observers for Nonlinear Systems
智能车软件培训-电机pid参数整合
暖通空调自控编程,送风机变频器接线与频率控制程序详解
考研调剂早知道
Carlos A.Coello Coello教授
pid云台自瞄