V
主页
焊接应用-焊接缺陷及对策(5)
发布人
伯朗特应用教学第五节!共5节课程,想学焊接的朋友们快来看看。 感兴趣的朋友们点个关注收藏点赞三连吧~制作不易,给点激励~ 有问题的朋友们欢迎评论区留言,UP主会尽力帮你解决问题哒。
打开封面
下载高清视频
观看高清视频
视频下载器
焊接应用-焊接轨迹示教(4)
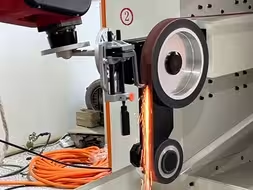
机器人应用于碳钢焊接应用案例
机器人原点偏移了怎么办
为什么买伯朗特机器人
机器人焊接跟踪怎么做?《四点寻位偏移法》告诉你答案!
伯朗特大课堂机器人操作之7 堆叠
伯朗特大课堂机器人操作之6 计数器与计时器
伯朗特大课堂机器人操作之18 码垛工艺
机器人焊接应用案例
大课堂-工具坐标-六点法
大课堂-示教器
联系伯朗特应用商的两种方式,购买,咨询,售后一应俱全。
大课堂-工具坐标
伯朗特大课堂机器人操作之12 工具坐标的标定
大课堂-工具台坐标介绍
怎么让焊接更简单?
伯朗特大课堂机器人操作之21 视觉工艺
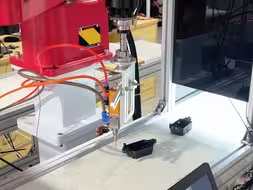
工业机器人焊接实机演示
机器人喷涂应用教学--喷涂应用
更长,更强,更快,伯朗特2480A机型介绍
焊缝各种缺陷是怎么造成的,看看视频就明白了
伯朗特《视觉识别》动态跟随涂胶
伯朗特大课堂机器人操作之24 Modbus通讯
如何避免仰焊粘焊条?注意下面3个重点
《1820六轴机器人》适用于上下料 打磨 切割涂胶等各行业应用
伯朗特大课堂机器人操作之1 驱控一体硬件
大课堂-控制柜
大课堂-数据源
1506法兰工件焊接应用案例
机器人安装要求与条件
大课堂-机器人堆叠定义和应用场所
伯朗特《电动径向浮动主轴》专为去除不规则轮廓毛刺,水口而设计
打磨工作站
焊接机器人与通用机器人的区别在哪?行业资深老师讲解
机器人车床应用教学--车床上下料应用课程
大课堂--转不规则点
大课堂-工具坐标-三点法
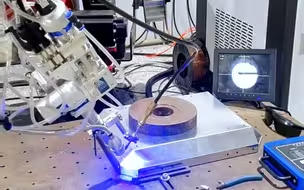
1820激光焊接应用实例
四轴并联机器人——蜘蛛手简介
0603水平机器人协同上下料应用