V
主页
京东 11.11 红包
机器人学:多轴旋翼机——3 Git与ROS介绍
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
机器人学:多轴旋翼机——2 Ubuntu与ROS 基本安裝及设定
机器人学:多轴旋翼机——1多轴旋翼机系统介绍
机械人学:多轴旋翼机——8 非线性控制器:几何追踪控制器
机器人学:多轴旋翼机——11 卡尔曼滤波器、扩展卡尔曼滤波器、无损卡尔曼滤波
机器人学:多轴旋翼机——7 Madgwick算法以及QP最佳化
机器人学:多轴旋翼机——6 凸函数最佳化
有限元——11-1 强形式和弱形式
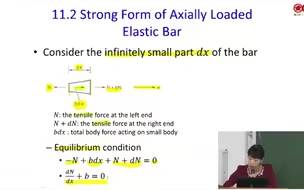
有限元——11-2 强形式和弱形式
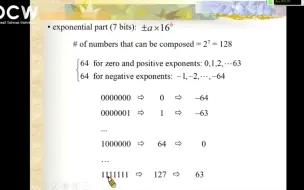
数值分析——1 舍入误差
机器人学:多轴旋翼机——12 在模拟环境中的多轴旋翼机
怀疑论——3 辩士:高尔吉亚
有限元——9-1 最小势能原理
【太空港中字】万能空中巴士——SA-2参孙通用运输机
商管程式设计——10 图形用户界面
有限元——2-1 矩阵代数
有限元——5-1 直接方法:桁架分析
商管程式设计——6 字符串
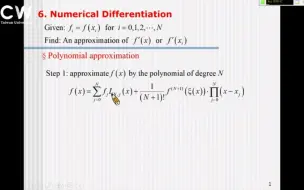
数值分析——5 数值微分和数值积分
怀疑论——12 蒙田的怀疑论
有限元——8-2 梁和框架分析
有限元——9-2 最小势能原理
有限元——3-1 直接方法:轴向弹簧
商管程式设计 ——1 简介
怀疑论——8 皮若主义的怀疑论:萨克督斯
怀疑论——5 怀疑论的反对者:亚里士多德
有限元——12-1 加权残值法
有限元——5-2 直接方法:桁架分析
马斯克宣布特斯拉机器人Optimus Gen将于12月发布!3大升级!
有限元——12-2 加权残值法
商管程式设计——11 查看和预览
有限元——6 近似函数:一维单元
电路与电子学——第24讲 戴维宁和诺顿等效电路
商管程式设计——2 计算机和条件
有限元——13-2 有限元公式
数值分析——4 矩阵方程
热力学——第十三讲 熵的统计概念,相平衡(1)
离散数学——第三讲 数学归纳法和函数
电路与电子学——第十五讲 瞬态
数位语音处理概论—— 6 Language Modelling
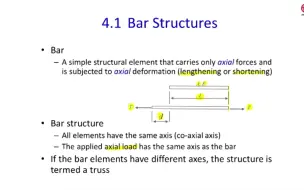
有限元——4-1 直接方法:杆结构