V
主页
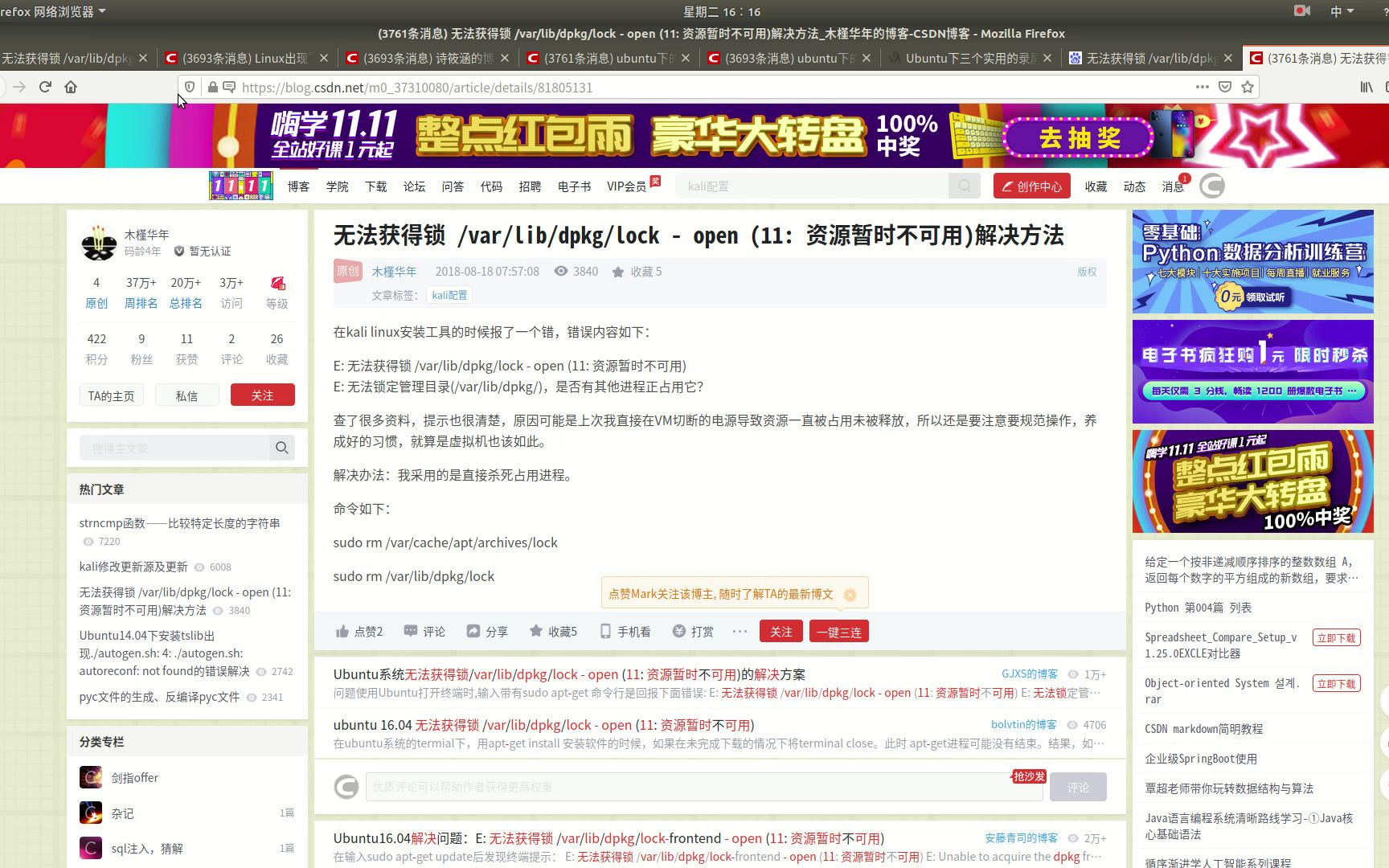
ROS安装(包含终端一些配置)librealsense安装realsense-ros安装录屏
发布人
ROS安装(包含终端一些配置)librealsense安装realsense-ros安装录屏
打开封面
下载高清视频
观看高清视频
视频下载器
Unitree 2024 ROS暑期学校课程视频03-人形机器人运动控制分享
智能无人机课程 2 四旋翼无人机的组成和拼装 上
Unitree 2024 ROS暑期学校课程视频01-四足机器人Go2开发分享
aruco二维码检测定位原理讲解及基于opencv的代码和ros功能包实现 20240403_181351
智能无人机课程 13 PX4仿真平台搭建
智能无人机课程 10 飞行日志分析与pid调参
智能无人机课程 6 飞行控制器
Unitree 2024 ROS暑期学校课程视频02-人形机器人H1开发分享
智能无人机课程 11 linux git python
智能无人机课程 12 ros gazebo
智能无人机课程 18 目标检测和跟踪
智能无人机课程 3 四旋翼无人机的组成和拼装 下
智能无人机课程 4 工程训练:如何减震
智能无人机课程 5 姿态表示与控制理论
【blender】“我告诉过你在完成之前不要动…”-腱鞘炎大佬新作
《松灵ROS 2开讲啦》第三期 ROS 2的URDF编写和Gazebo仿真控制
移动机械臂抓取
嵌入式开发2024 08阶段:Linux驱动(ros)
一次给他人的双光云台ROS串口驱动讲解 20210607_202821
嵌入式开发2024 09阶段:机器狗项目
1.9_现代CMake大型C++项目构建实战_C++ CMake Install 项目、库的导出与安装
【全368集】强推!2024暑假最细自学伪音全套教程,改掉用嗓子说话,伪音好听到爆!从嘤嘤怪进阶声优大佬(包含配音教程伪音技巧)
快速流畅!人工智能ROS小车雷达导航、路径规划、虚拟仿真、slam导航算法
aruco二维码降落原理与代码讲解及gazebo仿真演示 20240422_094842
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
《松灵ROS2开讲啦》第四期直播课:ROS 2代码实践
NUC+PX4+Mid360|无人机整体方案分享
ROS2 零基础入门教材推荐
双阿克曼小车基于简易线性MPC的曲线路径追踪仿真
基于kalibr docker的D435i双目标定和双目IMU联合标定操作演示录屏20220416_125342
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
把ego的plan_env模块单独取出订阅位姿和深度图构建自己可用的导航地图 20240315_091408 截取视频 截取合并
【人形机器人】在Gazebo/Mujoco中的仿真
机械臂协调控制复现
1.7_现代CMake大型C++项目构建实战_C++ 调用自己编译的库(一)
用fiesta基于位姿和深度图构建ESDF地图操作演示 20240317_091326
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
[新手可入门]基于pybullet强化学习机械臂抓取仿真
基于T265或vins px4定点指点原理讲解与gazebo仿真演示20240329_122655
路径跟踪 | 最优控制LQR算法实现(ROS C++/Python/Matlab)