V
主页
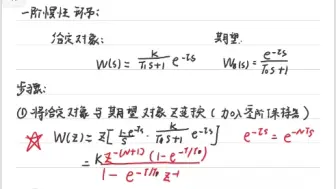
第七章 线性离散系统分析与校正 5. 最小拍控制器设计(一听就会)
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
最小节拍控制器
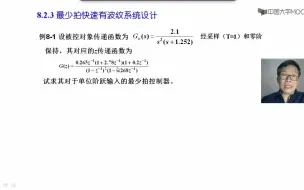
[8.2.3]--8.2.3最少拍有纹波系统设计
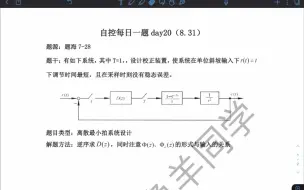
自控每日一题day20-最小拍系统设计
最小拍控制器的设计
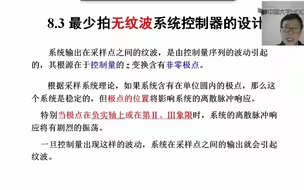
[8.3.1]--最少拍无纹波系统控制器设计
【2023自控考研基础课程】 自动控制理论/自动控制原理 第七章 离散系统的分析与校正<上>
[8.2.1]--8.2.1典型输入下最少拍系统的设计
【2025自控考研基础课】自动控制理论/自动控制原理 第七章 离散系统的分析与校正<1>z变换理论
计算机控制系统——二十分钟精通最小拍控制器设计方法(只需一个模板即可)
【2023自控考研基础课程】 自动控制理论/自动控制原理 第七章 离散系统的分析与校正<下>
自动控制原理-第六讲-离散系统-(2.2 离散系统数学模型,离散系统梅森增益公式)
线性离散系统的分析
最小拍无纹波设计补充,最小拍设计步骤分享
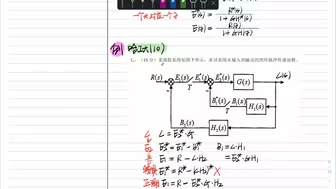
第七章 线性离散系统分析与校正 第一讲:如何求解开环、闭环脉冲传递函数及如何求解差分方程
【2025自控考研基础课】自动控制理论/自动控制原理 第七章 离散系统的分析与校正<5>最小拍设计
计算机控制系统复习
自动控制原理-第六讲-离散系统-(1.1 Z变换)
基础6 离散系统的分析与校正
自控最小拍无纹波系统设计步骤分享
控制考研 | 设计最小拍控制系统
最小拍控制系统设计1----(简单对象、复杂对象、无纹波)
第七章 线性离散系统分析与校正 2. Z变换求系统开环、闭环脉冲传递函数并对系统进行稳定性分析
自动控制原理题型归纳与方法总结(10)——离散系统分析与校正
最少拍控制器的设计与仿真
最小拍无纹波控制器的设计
第七章 线性离散系统分析与校正 3. 差分方程求脉冲传递函数
计算机控制系统-离散化设计方法
第七章 线性离散系统分析与校正 4.推导求闭环脉冲传递函数
计算机控制系统——大林/达林算法设计控制器及消除振铃(期末突击)
谁都看得懂的数字信号处理教程(第13讲z变换)
第八章 非线性系统分析 相平面分析法 2.饱和特性
计算机控制系统——数字PID控制器的常考知识点(期末突击)
第六章 线性系统校正 第二讲 串联滞后校正
控制考研 | 如何设计一个,最小拍系统
非线性微分方程的描述函数法与最小拍控制器
计算机控制系统简明教程 第五节 直接设计法(1) 最少拍系统设计
《计算机控制系统》期末速成课-3小时学完【不挂科】(赠送讲义+考点题库与答案解析)
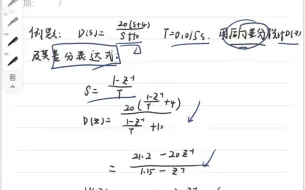
计算机控制系统—数字控制器的模拟化设计方法(期末突击)
计算机控制技术计控期末考试速成不挂科速成必考10分大题万能考题模板讲解考研复试计算机控制系统期末速成期末不挂科网课视频计控辅导视频计算机控制系统期末网课视频
计算机控制技术(国防科技大学)