V
主页
京东 11.11 红包
07_1.串口发坐标定位运动
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
05_1.获取两轴当前位置
07_3.键盘按键控制运动控制台.mp4
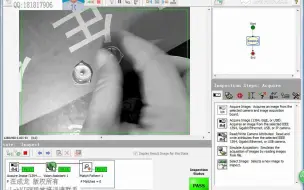
07_5.视觉助手标定、二值化、颗粒分析
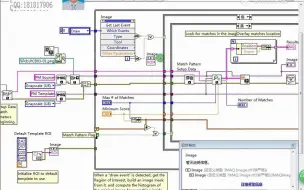
07、借鉴labview自带的例子做简单的匹配
07_2.Labview调用键盘
08_3.做摄像头采集、模板匹配2.mp4
01、Lab view视觉_采集图像
09_1.模板匹配,图像的标定、计算相对脉冲
02、Labview视觉列表框菜单建立
P12 编写龙哥labview视觉软件框架
P6 NI-Vision视觉助手采集图像
P9 labview串口通讯详解
03、运行时菜单
P4 安装labview系列程序
06、使用Vision Builder实例、模板匹配几何匹配.mp4
P5 NI-max配置摄像头采集图像
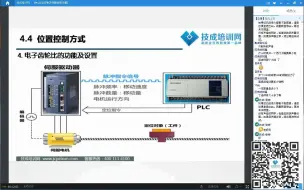
P8 定位控制及伺服参数设置
P1 定位控制及伺服参数设置
P11 龙哥labview视觉软件框架介绍
P4 定位控制及伺服参数设置
10、模板匹配坐标系转换、显示检测结果
09_2.视野中画十字
P3 PLC伺服定位控制及参数设置
P56 视觉助手 color location颜色定位讲解.mp4
11、复制载入图像、添加保存机种、显示操作日志
08_4.检查程序
P6 定位控制及伺服参数设置
07_4.CAD读图、DXF文件格式
06.串口通信控制运动控制台、自动模式
P10 labview tcpip通讯协议详解
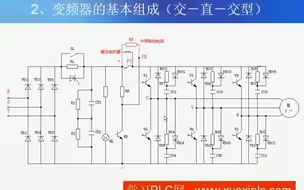
1、变频器原理
P15 视觉助手几何测量案例讲解
P7 定位控制及伺服设置参数
P112 编写视觉软件第3阶段3.mp4
02.原点回归
4_PLC与变频器通信(MODBUS-RTU数据读取、写入数据格式)
P5 定位控制及伺服参数设置
13、标定
P109 编写视觉软件第2阶段3.mp4
05、使用观察Vision Assistant实例、标定