V
主页
第4讲:Dummy REF主控制器F405定时器框架及时钟树分析
发布人
第4讲:REF主控制器F405定时器框架及时钟树分析
打开封面
下载高清视频
观看高清视频
视频下载器
第6讲:DUMMY驱动控制器F103CBT6时钟树以及定时器配置剖析
第2讲:DUMMY REF 主控制器代码架构及运动模式分析
BGM过大,重新优化,科技与狠活,稚晖君DUMMY核心硬件手动焊接,调试,问题定位,解决,给你一个详细的硬件调试指南 。硬件告一段落,开启下一段冒险
科技与狠活3: 手工活,带你走进详细的手搓贴片,虽然曲折,好歹dummy机械臂驱动,控制均正常
科技与狠活5:Dummy真小白组装避坑说明,电机径向磁铁,减速器,相位接线,问题一个不能少,小白必踩坑
第3讲:Dummy机械臂重点内容整合,并重录第2讲内容(有补充部分,内容更加精简)
基于go-zero的IM系统实战(架构设计)
科技与狠活4: Dummy核心板,驱动板手搓后,系统调试问题说明,避坑指南,最新硬件优化
科技与狠活1:有点坑,还是说明一下,dummy复刻没那么简单,42电机驱动说明下潜在问题
科技与狠活2:避坑,复制dummy没那么简单吧,35步进电机FOC控制,问题说明1
第5讲:如何基于串口进行Dummy机械臂调试(关键)
Unity3d 游戏开发框架教程YukiFrameWork
【2024最新版 ESP32教程(基于esp-idf)】第一讲 ESP32开发和课程介绍
基于磁编码器校准,可以自己校准了,有点意思了,后续还是要详细代码讲,预告一下
基于go-zero的IM系统实战(架构&Etcd使用)
Dummy关节调试,关节组装,后续补充详细硬件复刻
谁还没听过最美老师讲的C语言:函数的基本用法及传参
基于RISCV指令集架构的五级流水线、64bit处理器设计-各个模块的代码分析(1)
【2024最新版 ESP32教程(基于esp-idf)】第四讲 ESP32程序架构和启动分析
科技与狠活6:告诉你如何基于串口控制机械臂位姿,具体操作效果呈现
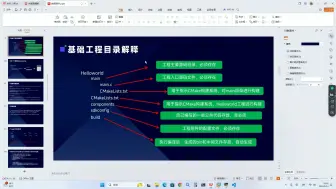
【开源!】7分钟快速掌握机械臂软件框架
【开源】基于STM32的精美水滴充电动画
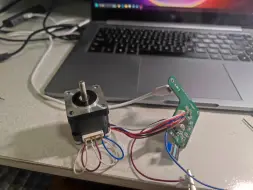
手把手教程!!!ESP32使我的电机旋转
05_多模式FOC控制系统 - 统一框架设计
商业级嵌入式系统设计之主流芯片选型指南
全栈架构:从0开始,Vue的搭建与开发,手把手教你写一个前端脚手架
挑战90天独立开发 #7:Express 应用框架
浅谈框架与组织结构 C#语言专题 · 初级 专题一
0022 晶体二极管原理(四) 再谈能级能带 自学计算机到极致:手搓电脑之从欧姆定律到微型计算机
机器人驱动钢网焊接,没有两把刷子,首次使用加热台,尝试下,就尝试下,费点事而已
29-入门架构师第二十九讲,手写网关(二):理解SpringWebFlux的DispatcherHandler,并使用WebHandler
如何将 Neovim 与 Devcontainers 结合使用
基于stm32可燃气体浓度与环境温湿度检测
Xinference:开源大模型推理运行框架
全网最完整最干练的STM32CubeMX/CubeIDE开发教程 拥抱高效Cube开发方式—Kevin带你读《STM32Cube高效开发教程基础篇》
机器人组装第一阶段效果,后续还是得详细讲解下具体技术细节
【Unity搬运】6 Code Smells REFACTORED to Patterns!
基于RISCV指令集架构的五级流水线、64bit处理器设计-RISC-V指令集介绍
17岁,绘制出自己的STM32核心板
简单的复位,机器人复位,就这么简单