V
主页
发那科roboduide离线编程
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
ABB机器人高级编程
认识安川机器人
FANUC码垛
PLC流程化编程—自动化小车案例
kuka机器人如何实现程序任务切换
电气工程师快速掌握Eplan
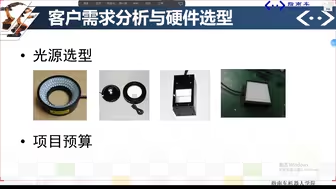
【工业机器人】利用工业相机与VISIONPRO软件实现测量任务[视觉]
如何成为年薪20万的机器人工程师
安川工业机器人操作与基础编程-1
西门子模块化编程 自动洗衣机程序案例讲解
西门子HMI通信如何控制机器人
ABB保养流程
【工业机器人】MVP视觉软件应用之测量功能
PDPS仿真软件.
【工业机器人】基于C#制作TCP调试工具
工业机器人工装夹具
ABB点焊机器人工作站的构成
10行代码搞定西门子PLC数据读取ABB机器人
KUKA机器人基础操作与编程-1
安川DX200弧焊外部信号预约启动!工业机器人
EPLAN部件库的创建
DELMIA 工业机器人模拟机仿真
西门子S7-1200之间的profinet、profibus-DP,以太网通信(上)
西门子S7-1200之间的profinet、profibus-DP,以太网通信(下)
【工业机器人】MVP视觉软件应用之读码功能
【工业机器人】机器视觉应用软件技术简介
如何让机器人快速回零点?
机器人走圆弧需要示教几个点?
安川工业机器人操作与基础编程-3
码垛应用程序编写&离线程序调试(上)
机器人干涉区如何设置?
【工业机器人】机器视觉应用软件之模板匹配
工业机器人由哪些组成
KUKA基础编程:机器人TCP、基坐标系设置
一个好的调试工程师需要会哪些,都说清楚了
一个ABB视觉分拣工作站
你知道视觉是如何与PLC交互通讯的吗?
FANUC机器人基础操作与编程-3
码垛应用程序编写&离线程序调试(中)
机器人码垛程序怎么写?