V
主页
四轴飞行器原理系列—负反馈
发布人
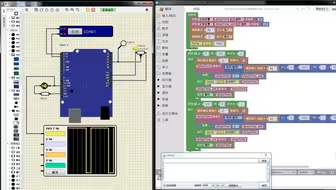
负反馈简介: 本期会介绍如何用单片机完成运算,实现负反馈算法,达到稳定机身姿态的目的。还会演示PID各参数实际的作用。 链接: https://github.com/jamesshao8/YMFC-3D/tree/main/YMFC-3D_Flight_controller 关键词: Arduino, PID, 无人机, 飞控
打开封面
下载高清视频
观看高清视频
视频下载器
四轴飞行器原理系列—无人机陀螺仪
四轴飞行器原理系列—合并代码
四轴飞行器原理系列—试飞
真的绝!四轴无人机竟能如此简单易学?第四期—控制无刷电机
真的绝!四轴无人机竟能如此简单易学?第六期—面向未来的实验
1.四轴飞行器原理系列—内容介绍篇
四轴飞行器原理系列—无人机遥控信号
真的绝!四轴无人机竟能如此简单?—第三期《无人机组装和测试》
PID控制是什么黑科技?这下明白了
真的绝!四轴无人机竟能如此简单易学?第七期(压轴彩蛋福利)—SDR 无人机控制
第一集:项目历史和原理图讲解
真的绝!四轴无人机竟能如此简单易学?——第2期《深入代码》
真的绝!四轴无人机竟能如此简单易学?第五期—从无人机到软件无线电
arduino 单片机仿真 呼吸灯 频率控制 Mixly + SimulIDE + VSPD(虚拟串口)
PixelClock像素时钟(一) 展示
PID控制滚球平衡
帅化民:「鸣镝MD-22」出自史记匈奴传!指哪打哪!核力量平衡!
1.什么是EMI 为什么要做EMI测试
家人们 终于吃上平衡小车了
【知识分享】无人机穿越机飞控电调aio架设 基本调试 航模知识 caac多旋翼操作员教员理论
2.什么是产品认证为什么要做认证
真的绝!四轴无人机竟能如此简单易学!
从零开始制作四旋翼无人机 EP1 - 硬件原理图与PCB介绍
高速数字接口测试系列——高速USB2.0 host一致性测试
基于ESP32pid算法火箭飞控自稳系统,相比第一代,简化了算法 ,使舵机的运行更加灵活和快捷
X6飞控搭配UWB模块,为无人机赋能室内导航定位
PID还挺好调的
韩国无人机丑闻,简直丢人丢到家了!
开源6自由度机械臂
基于陀螺仪遥控的stm32小车
开箱199元 HF32位电调 F435国产AIO飞控
网友设计的STM32无人机飞控板,一起来帮他看一下~
[inav]固定翼垂起(VTOL)参数设置教程
边玩边学ESP32 - 第二集
小钉锤arduino金属机械臂带手机控制SNAR6
ESP32蓝牙音箱歌词提示器
印军高层的焦虑:中美电子战水平之高令俄乌汗颜,印军非常尴尬
2024飞北无人机项目云南选拔赛
高速数字接口测试系列—MIPI D-PHY一致性测试
你敢信,这是一台中国制造的F-35 肥电