V
主页
京东 11.11 红包
Fall 2023 GRASP SFI - Autonomy for insect-scale robots
发布人
GRASP Lab ABSTRACT Countless science fiction works have set our expectations for small, mobile, autonomous robots for use in a broad range of applications. The ability to move through highly dynamic and complex environments can expand capabilities in search and rescue operations and safety inspection tasks. These robots can also form a diverse collective to provide more flexibility than a multifunctional robot. Advances in multi-scale manufacturing and the proliferation of small electronic devices have paved the way to realizing this vision with centimeter-scale robots. However, there remain significant challenges in making these highly-articulated mechanical devices fully autonomous due to the severe mass and power constraints. My research takes a holistic approach to navigating the inherent tradeoffs in each component in terms of their size, mass, power, and computation requirements. In this talk I will present strategies for creating an autonomous vehicle, the RoboBee – an insect scale flapping-wing robot with unprecedented mass, power, and computation constraints. I will present my work on the analysis of control and power requirements for this vehicle, as well as results on the integration of onboard sensors. I also will discuss recent results that culminate nearly two decades of effort to create a power autonomous insect-scale vehicle. Lastly, I will outline how this design strategy can be readily applied to other micro and bioinspired autonomous robots. PRESENTER Farrell Helbling is an assistant professor in Electrical and Computer Engineering at Cornell University, where she focuses on the systems-level design of insect-scale vehicles. Her graduate and post-doctoral work at the Harvard Microrobotics Lab focused on the Harvard RoboBee, an insect-scale flapping-wing robot, and HAMR, a bio-inspired crawling robot.
打开封面
下载高清视频
观看高清视频
视频下载器
Russ Tedrake : Motion Planning Around Obstacles with Graphs of Convex Sets
Fall 2023 GRASP SFI - Margaret Coad, University of Notre Dame
Spring 2024 GRASP Robot Learning by Understanding Egocentric Videos
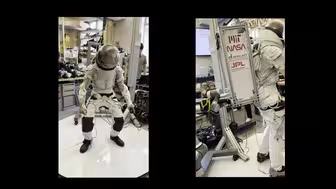
ICRA2024- Supernumerary Robotic Limbs to Support Post-Fall Recoveries for Astron
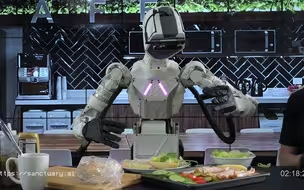
Robots Doing Stuff #3 - The Turkey Sandwich Paradox
For helper robots, the smallest things can be the hardest to grasp
Cassie and Mini Cheetah Autonomy at University of Michigan
Justin Yim, University of Illinois, -Small Robots Traversing the World at Large
RI Seminar_ Ankur Mehta _ Towards $1 robots
FALL 2021 GRASP on Robotics Ryad Boseman, Universiy of Pittsburgh
The Story Behind Precision Autonomy - Amazon
Spring 2022 GRASP SFI - Shuran Song, Columbia University
Panel discussion - ICRA 2020 Workshop on Shared Autonomy
The design and fabrication of a soft robotic hand
Soft Talk - Electroionic Artificial Muscles for Biomedical Soft Robots - Manmath
Robotics inspired by Nature
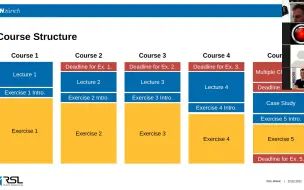
Programming for Robotics
Castor Oil-based Elastomers for Sustainable Soft Robotics
CMU Faculty Dialogues- Softbotics
How can we bring robots into challenging environments | Disruptive Thinkers
Towards Collective Artificial Intelligence- Radhika Nagpal, Princeton University
From the archives- IHMC Atlas Clearing Debris with Teleoperation
Optimal elastic wing for flapping-wing robots through passive morphing
Towards Adaptive Human-Robot Teams Workload Estimation - Julie Adams, Oregon Sta
Intelligent Wearable Robotic Devices for Augmenting Human Locomotion
Robots Doing Stuff #20 - Bagging Grocerie
可爱的机器人宠物 MOFLIN - An AI Pet Robot with Emotional Capabilities
Grounding language in robotic affordances
Robot Imagination_ Affordance-Based Reasoning Unknown Objects
Robotics: Science and Systems 2022 Conference
Matthew T. Mason _ Robotics and Warehouse Automation at Berkshire Grey
RI Seminar-Safe and Stable Learning for Agile Robots without Reinforcement Learn
Ascento Fails
Allison Okamura - Human Interface for Teleoperated Object Manipulation with a So
Supernumerary Robotic Limbs to Support Post Fall Recoveries for Astronauts - ICR
Introducing Harmony SHR–the latest in upper-extremity robotic rehabilitation
Igor Mordatch - Reinforcement Learning via Sequence and Energy-Based Modeling
Automatica 2022 recap
The Physical World with High-Resolution Tactile Sensing - Wenzhen Yuan, CMU
自重构机器人 Assembler robots could eventually build almost anything