V
主页
保姆级从零手写自动驾驶CV课程
发布人
为了迎合自动驾驶零基础同学的诉求,手写AI推出保姆级手写自动驾驶CV课程。 课程方式是一边录制一边学习,每周定时发布课程视频,在群里交流。 为零基础的学员入门自动驾驶CV方向打下坚实的基础。 总时间:约1.5月(讲完为止) 出课时间:每周二四六19:30出课 上课方式:现录现学 适合人群:零基础/具有一点python基础,学生、应届生、转行人员、新手
打开封面
下载高清视频
观看高清视频
视频下载器
第二节:课件和开发环境介绍
「AI写代码神器」Cursor实操教学:用AI智能批量命名本地图片!0基础也能懂。
YoloV8的高效推理-分割检测
英伟达自动驾驶BEVFusion从算法到落地-1.雷达及其数据结构
对比学习: 0-课程介绍
2.1PTQ-QAT原理介绍
英伟达自动驾驶BEVFusion从算法到落地-5.环境配置与debug流程
第三节:python基础,变量和基本数据类型
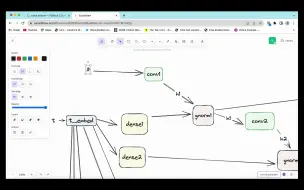
手写NLP 长期 48_transformer逐行复现
【中文】特斯拉新的"真智能召唤"功能可用性到底如何?
1.1.3卷积核剪枝
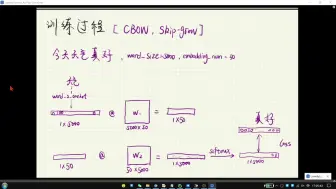
word2vec 词向量!手写代码!
英伟达自动驾驶BEVFusion从算法到落地-3.其余传感器
第十四节:装饰器
手写AI逐行手写知识蒸馏:0_课程介绍
2.【图解】概览diffusion模型的算法
手写扩散模型-UNet引入
手写一个llama factory—9-预训练操作方法
手写一个llama factory——1-wsl2安装1
手写AI逐行手写知识蒸馏:1_知识蒸馏原理阐述
手写一个llama factory——4-环境安装1
第二十节1:正式进入人工智能,复习sqrt函数
GPT大模型剪枝-4.2最小二乘法角度引入OBS推导
人类记忆是否被‘清空过’,AI人工智能认为1913年是人类文明的巅峰
手写AI_NLP系列课程之_文本分类
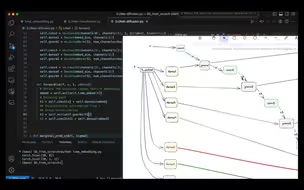
手写扩散模型-带有时间依赖的UNet逐行复现
又一期交通事故,这是啥车,太可怕了
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
手写AI逐行手写知识蒸馏:2_数据加载
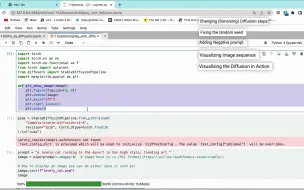
手写扩散模型-diffusers简单API的学习
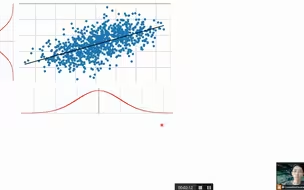
手写卡尔曼滤波:1.如何对现实世界的运动进行建模
手写卡尔曼滤波:12.【轻量数学】协方差矩阵的简介
4.【代码】训练与推理代码框架
手写一个llama factory—19-精读llama-factory源码
【毕设-大作业01】-自动驾驶环境感知与辅助-纯视觉方案
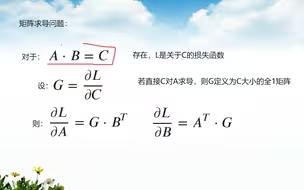
第二十三节:【很重要,必背】矩阵的求导,基础中的基础
14-1 从零手写模型量化框架 量化卷积原理
手写AI系列课程: 命名实体识别任务! 持续更新! 手写代码!
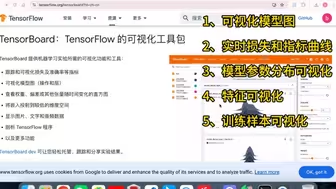
从五个方面讲解深度学习效率神器Tensorboard使用技巧
使用 YOLOv8+双目立体匹配,实现目标检测与测距