V
主页
京东 11.11 红包
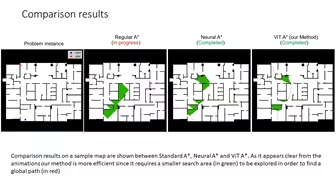
[ICRA 2024] DiPPeR: Diffusion-based 2D Path Planner applied on Legged Robots
发布人
Website: https://rpl-cs-ucl.github.io/DiPPeR/ Arxiv: https://arxiv.org/abs/2310.07842 Paper: https://ieeexplore.ieee.org/abstract/document/10610013
打开封面
下载高清视频
观看高清视频
视频下载器
[Humanoid 2023] ViT A*: Legged Robot Path Planning using Vision Transformer A*
【2024版SD教程】这可能是B站唯一能将Stable Diffusion讲明白的教程,存下吧,比啃书好太多了!7天从入门到精通商业变现!拿走不谢,允许白嫖!
SPF-EMPC Planner
70年老算法Dijkstra被证明普遍最优 斩获顶会FOCS 2024最佳论文
大三专科生,勇闯工训赛,限制三分钟完赛,已经调成极限,在线求大佬指点,谢谢
【超爽中英】2024全网公认最通俗易懂的(吴恩达机器学习)教程,全程干货无尿点,这还学不会你来锤爆我!!
【史上最全系统SD教程】秋叶最新Stable Diffusion v4.9整合包 2024独家最新版AI绘画教程 零基础入门到精通SD教程人工智能AIGC保姆级
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
开源!基于RRT*的路径规划算法(ROS C++/Python/Matlab实现)
机器学习大战片哥片姐
【2024推荐】这真的太详细了!计算机大佬又出神作!堪称全网最全最通俗易懂的MATLAB全套教程入门到精通,草履虫听了都要点头!
【LLM前沿】6小时精讲四大多模态大模型CLIP BLIP VIT MLLM及对话机器人办公助手!绝对的通俗易懂的大模型应用教程!
分享一个无限制ai,进入既涩
李飞飞:斯坦福计算机视觉公开课
【秋叶SD整合包V5.0】2024全网最新!Stablediffusion独家保姆级教程大佬SD教程零基础入门到精通全套人工智能AIGC绘画SD3.5系统教学
【Mamba+遥感】简直就是2024的王炸组合,基于Mamba的遥感图像处理直接引爆顶会!
2024终于有科研大佬把“你的科研能力从什么时候开始突飞猛进的?”讲清楚啦!
辛顿现场授课:AI在生物学上的神奇应用,太超前
👍2024年最佳!AI电脑配置怎么选?玩AI组电脑,这一篇文章够了🟢 高性能和高性价比两个方案
2024最新即插即用卷积模块MSPANet打败Resnet、SE、CBAM,CNN框架模型涨点!
二白深夜顺拐机器人
【附源码】2024最新53个大模型实战项目!练完即就业Ⅰ基础到框架Ⅰ适合小白入门_LLM_RAG_Agent_ChatGPT_Prompt
赛博朋克东南大学?“CYBATHLON2024”半机械人仿生奥运会夺冠!全程回顾
直接抄她的代码,就是最好的学习方法!!
ROBOMASTER 2025 赛季启动|超级对抗赛规则发布
神经科学中最核心的公式
人工肌肉驱动的人形机器人|2024【Clone】
【吹爆】2024年B站从0到1最好最全的人工智能基础课程,清华大佬带你恶补AI专业知识!—人工智能/机器学习/深度学习/神经网络/计算机视觉
今天把我做的这个机械臂开源
趁着智能车赛题出来前玩玩工创
流体力学全面机器学习化!?
【聚类+Transformer】发A会的王炸组合,这俩搭配简直太强了!
最全最新机器学习、强化学习教程,从入门到精通!20课时机器学习速成完整版付课件代码
吹爆!2024最详细的大模型学习路线已整理!手把手带你高效入门,大模型论文全打通!(大模型微调/大模型学习路线/大模型入门)
比喝水还简单!2024年最详细的【大模型自学路线图】整理出来啦!迪哥手把手教你最高效的大模型学习方法,轻松搞定AIGC大模型!(大模型训练/大模型微调)
B站强推!【Matlab与机器学习的入门进阶与提高】花3小时就能从入门到精通,草履虫都能学会的机器学习算法!人工智能|决策树与随机森林|机器学习
免费AI绘图软件!出图快,质量高!本地安装,永久使用,stable diffusion最新整合包!
【神经网络杀疯了!】登上nature!人工智能迎来新突破!被证明具有泛化能力,能像人类一样思考
Arduino导弹防御雷达系统教程
强推!导师放养SCI论文发到手软!研究生手把手带你亲历SCI论文,从基本套路讲解和手把手实操演示【SCI论文写作】(人工智能/计算机视觉)