V
主页
京东 11.11 红包
3-3 Compass指南针使用
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
3-4Compass指南针测量技巧
2-2 标定工具坐标系
4-3 焊接件离线路径生成
3-2 测量工具使用
4-4 焊接件路径优化及仿真.mp4
3-5 创建机械装置
5-1 多机器人协作工作站虚拟仿真.mp4
4-5 机器人离线程序导出
2-1 平面工作站搭建.mp4
3-6 创建用户工具
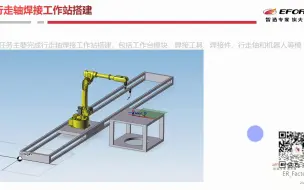
4-2 行走轴焊接工作站搭建
6-1 多机器人搬运工作站搭建.mp4
4-6 Robox示教器虚拟调试
2-4 项目工程保存及打包
3-1 建模功能使用
00ER_Factory数字化工厂软件课程内容概述
4-1-1 模型轻量化使用-新版本
2-3 创建平面工作站路径并仿真.mp4
1-4ER_Factory软件快捷键.mp4
1-1 工业机器人仿真软件基本认知
7.ABB上位机系统-关节移动机器人
S-R-S构型七自由度冗余机械臂运动学建模(三):最优臂角选取
1-2ER_Factory软件安装.mp4
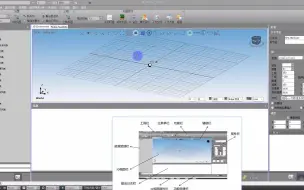
1-3ER_Factory界面认知.mp4
9.ABB机器人上位机系统-IO信号采集
基于Codesys的非标设备PLC程序框架
机器视觉数据采集与监控系统-开发篇-功能升级
外部数据(如视觉、传感器等)引导ABB机器人+EGM高速高精+软件,使得机器人场景应用性增强了不少 #ABB机器人EGM #robotstudio #技术分享
ER_Factory机器人虚拟仿真与离线编程精彩花絮
ABB机器人上位机系统-程序编辑及传输功能介绍
ER_Factory数字化工厂-数字双胞胎的虚拟调试
C#与汇川PLC的ModbusTCP通信
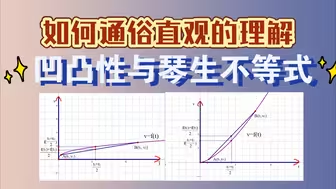
以物理角度直观理解凹凸性与琴生不等式
11.ABB机器人上位机系统-程序传输.mp4
10.ABB机器人上位机系统-程序编辑
RobotStudio项目工程解包数据丢失怎么办?
RobotStudio创建机器人工具
1.ABB机器人上位机系统-权限介绍
工业机器人搬运码垛应用-RobotStudio实战篇-体验
【VREP】仿ABB | 三机协作