V
主页
【阿木新课】新手入门PX4工程应用开发?看这门课就够了
发布人
本课程致力于提高PX4二次开发学生的入门开发能力,内容涵盖无人机飞控发展、使用Pixhawk组装无人机的相关硬件、使用PX4配套的相关软件、PX4固件下载与仿真环境配置、QGC地面站使用教程、PID控制原理解析、姿态控制的在线调整、位置控制的在线调整、飞行日志的分析和数据处理以及开发者素养等部分。通过本课程,将进一步加深新手对无人机组成、硬件(动力、控制、其他)、软件、Linux、PX4、QGC、日志分析等的相关理解,熟悉并掌握代码开发的必备知识。
打开封面
下载高清视频
观看高清视频
视频下载器
新手入门无人机+PX4+ROS工程应用开发?看这门课就够了 1.无人机、PX4、ROS必知知识
速成PX4二次开发01-第一个简单应用程序-Hello world!
[组合拳]matlab写算法->PX4去控制->ROS来可视化
【浙江大学】浙大博导带你从0制作无人机
B站最详细的国内顶级无人机仿真平台XTDrone搭建教程
PX4 加了光流就是稳
新手入门无人机+PX4+ROS工程应用开发?看这门课就够了 3.仿真环境开发
PX4二次开发快速入门(一):概述
最强PX4飞控平衡小车预告~
新手入门无人机+PX4+ROS工程应用开发?看这门课就够了 4.无人机offboard控制
新手入门无人机+PX4+ROS工程应用开发?看这门课就够了 2.仿真环境介绍及其配置
【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab
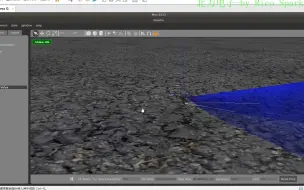
Matlab Simulink (A_star避障仿真)与PX4、ROS联调教程
【东北大学REAL实验室】自主无人机组装教学视频 - 4 PX4_Ctrl FSM讲解与真机定点飞行
1、PX4固件简介
Mavros和Mavlink究竟是什么东西?
GLPX4-R329开源运行在Linux上的PX4飞控讲解+试飞
超全无人机学习路线+满满干货
【开源所有】ubuntu18.04+px4+ros+matlab2020a+mavros安装指导
ROS+PX4学习与开发 2.3 ROS无人机多点巡航代码编写
5、QGC地面站使用
手搓飞控入门第一次课:飞行控制系统的概念
也许是最小的PX4小四轴?基于ESP32的PX4空心杯小四轴
第二讲【多旋翼飞行器入门】Gazebo仿真(1)
超维小课堂(十四):pixhawk2.4.8飞控下载PX4 fmuv3固件
超维小课堂(十三):PX4使用tfmini激光定高
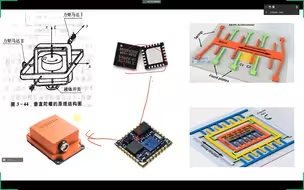
超维小课堂(二):使用PX4控制舵机
【干货】如何学习ROS+PX4?万变不离其宗!
Ubuntu+Ros+Px4+Matlab可直接打开并使用的虚拟机!
ROS+PX4学习与开发 2.0 ROS与PX4的通信
PX4二次开发快速入门(三)自定义串口驱动3.1测试
PX4二次开发快速入门2.1:自定义工作队列
【完整版】-多旋翼飞行器理论与实践系列实验-【北航 全权】
px4开发环境视频教程一,含安装编译环境全过程讲解,坑点解读,如何搞定gazebo+qgc+px4+视觉开发环境
平平无奇的使用一枚ESP32运行PX4飞控程序的小四轴组装试飞
4、PX4主要参数讲解
APM/PX4/Pixhawk飞控固件编译教程
3、无人机硬件平台搭建
【23寒假培训】常见开源飞控使用
ROS+PX4开源无人机系列-内容简介