V
主页
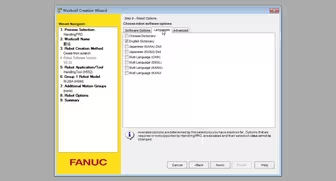
发那科机器人KAREL入门教程(字幕版)
发布人
【课程简介】: 发那科工业机器人较为底层的语言- KAREL,为用户提供了许多的函数库,方便用户进行开发,本系列教程,从0基础开始。注意:此版本为试看版本,如需购买完整版本,联系作者,谢谢!
打开封面
下载高清视频
观看高清视频
视频下载器
发那科机器人编程入门到精通——82集
发那科karel编写User Socket连接程序
FANUC 基础应用 46讲
自用-roboguide软件教程-fanuc工业机器人编程与应用
FANUC机器人20期培训
FANUC法那科机器人编程-龙丰自动化
发那科机器人仿真视频教程
FANUC发那科工业机器人从入门到精通
发那科机器人PN通讯机器人端设置1
发那科工业机器人离线编程
深度了解发那科机器人程序架构,让你编程游刃有余。
工业机器人技术基础(完)
Fanuc机器人开发,承接Karel从入门到精通开发培训。
FANUC工业机器人点动运行机器人快速回到原点位置
[工业机器人] FANUC法那科工业机器人从入门到精通
发那科机器人搬运程序设计思路
Fanuc 机器人实操课程
发那科机器人仿真软件教学
7-3 KAREL程序的调试方法《FANUC工业机器人离线编程与应用》配套微课视频
FANUC发那科机器人入门应用
发那科机器人modbusTcp通信参数配置详细步骤教程
发那科《个人学习记录》KAREL—Socket套接字
将发那科机器人坐标系彻底搞懂
5_4 FANUC工业机器人与S7-1200系列PLC I/O通信案例,请根据实际情况配置《FANUC工业机器人离线编程与应用》余攀峰 编著 机械工业出版社
苏州工业机器人培训-发那科IO指令教程
发那科机器人快速注释IO方法
我的2022毕业设计
《FANUC工业机器人离线编程与应用》微课视频:7-1 KAREL入门,想实现更多的功能?或许FANUC工业机器人的底层开发就从这里开始~
发那科机器人程序编写案例
叔牙--FANUC机器人KAREL语言开发的控制系统注释工具3件套
PLC与发那科如何通过ModbusTCP信号交互的呢?
7-5-1 KAREL程序中位置的计算,直角坐标系和关节坐标系的函数及数据类型均不相同《FANUC工业机器人离线编程与应用》 配套微课 黄维 余攀峰 主编
7-5-2 KAREL语言中使用CALL_PROG函数调用TP程序《FANUC工业机器人离线编程与应用》 配套微课 黄维 余攀峰 编著 机械工业出版社 出版
08 发那科机器人PR寄存器讲解
FANUC机器人现场编程及应用(未完待续)
【发那科机器人】 KAREL- 运动控制 01
7-2 Karel语言下控制I/O的方法《FANUC工业机器人离线编程与应用》配套微课视频
FANUC工业机器人KAREL语言以太网Socket通信《FANUC工业机器人离线编程与应用》黄维 余攀峰 编著 机械工业出版社
7-5 karel程序支持功能,自动运行PC程序,DI控制PC程序运行《FANUC工业机器人离线编程与应用》 配套微课
发那科《个人学习记录》仿真测试—动态抓手