V
主页
京东 11.11 红包
马克笔6DOF姿态估计抓取-法奥FR5协作机械臂+奥比中光Gemini2 3D相机+柔性二指夹爪
发布人
马克笔姿态估计与6DOF抓取 Open3D马克笔(圆柱体)6DOF姿态估计,添加了圆柱体的姿态矫正算法。 -----硬件配置----- 协作机械臂: 法奥FR5 3D相机: 奥比中光Gemini2 末端执行器: 柔性二指夹爪
打开封面
下载高清视频
观看高清视频
视频下载器
Open3D马克笔(圆柱体) 6DOF姿态估计 - 奥比中光 Gemini2
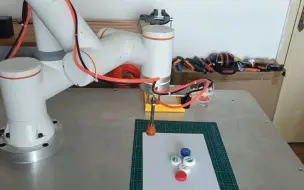
可乐罐6DOF姿态估计与抓取案例-法奥FR3-奥比中光Gemini2
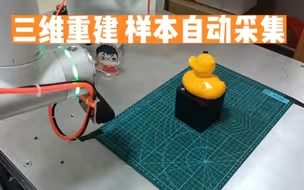
3D相机环拍扫描-三维重建样本采集自动化
手眼标定实验-眼在手上-奥比中光Gemini2+法奥FR5六轴协作机械臂
三维重建样本自动采集-法奥FR5协作机械臂+奥比中光Gemini2 3D相机
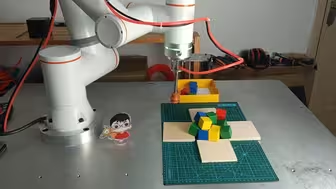
彩色木块无序抓取-YoloV8实例分割-奥比中光Gemini2+法奥FR5六轴协作机械臂
高精度手眼标定效果展示(法奥FR3+奥比中光Gemini335)
3D相机案例展示-奥比中光Astra系列 OpenCV+Open3D+YoloV5+MediaPipe
包装盒尺寸测量与姿态估计-奥比中光Gemini2 双目结构光3D相机
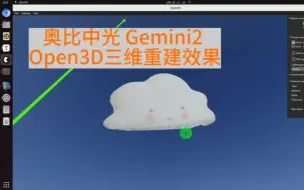
Open3D三维重建效果-奥比中光Gemini2 双目结构光3D相机
双目结构光深度相机-3D点云拍摄效果-奥比中光Gemini Pro
机械臂色块抓取(5DoF) Python+OpenCV
协作机械臂ArucoTag抓取实验-奥比中光Gemini2+法奥FR5
机械臂3D视觉抓取 -YoloV8目标检测-法奥FR5六轴协作机械臂-奥比中光Gemini2 3D相机
游戏手柄遥控-法奥协作机械臂
笛卡尔空间-空间圆弧插值+Slerp姿态插值混合-六轴协作机械臂PyBullet仿真
法奥FR3 物块抓取案例 ROS MoveIt
节卡JAKA C7-六轴协作机械臂-自研Python运动控制系统
机械臂TCP标定辅助工具-法奥FR3
法奥FR3 马克笔3D视觉抓取案例
非接触式吸盘 伯努利原理 机械臂末端执行器
发现国外的一个基于Arduino的乒乓球机器人。用双目相机,通过三角测量定位乒乓球位置。机械臂四周放了AprilTag,用于定位机械臂跟相机之间的变换。预测乒…
Innfos Gluon 六轴协作机械臂-自研Python运动控制系统
笛卡尔空间-空间直线插值-S形轨迹规划-六轴协作机械臂PyBullet仿真
包装盒6DoF位姿估计与机械臂码垛-勤劳的搬运工
卸扣+螺栓工件姿态估计案例 – 跨维工业3D相机
六轴协作机械臂运动学+碰撞检测实验
手柄遥控效果-Innfos Gluon六轴协作机械臂-机械臂示教
自适应夹爪-抓取效果-Innfos Gluon六轴协作机械臂
OpenMV机械臂AprilTag识别与物块抓取
UR协作机械臂姿态插补-PyBullet仿真
机械臂工作区Base标定 法奥机械臂FR3
机械臂运动学控制-色块抓取【1Z实验室】
钧舵EPG50-60柔性夹爪 ROS SDK–法奥FR3长臂猿模式
机械臂手眼标定(眼在手外)–法奥FR3-ROS RVIZ
20sffactory 3D打印机械臂-视频合集
深度视觉,三维感知!全新3D深度视觉机械臂闪亮登场,空间抓取、体积测算统统不在话下!
机械臂色块识别与抓取 OpenCV+树莓派4+华馨京4DoF机械臂
四自由度机械臂瓶盖抓取-Python机械臂运动控制+YoloV5目标检测
MaskRCNN实例分割-3D打印工件无序-Detectron2