V
主页
疯壳IOT无线路由器网关开发实战4.1. 如何更换原生logo
发布人
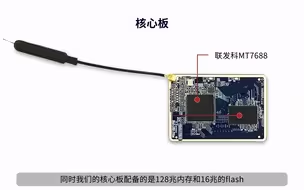
本课程以MT7688无线路由器网关为实例,系统讲解了IOT无线路由器网关开发的技术知识。结合开发套件和技术资料学习本课程,学习者可以快速掌握IOT无线路由器网关开发的相关技能,开发出可量产的路由器网关产品。
打开封面
下载高清视频
观看高清视频
视频下载器
疯壳IOT无线路由器网关开发实战2.3. 开发环境搭建——源代码解压和开发工具的配置
疯壳IOT无线路由器网关开发实战1.1. 开发套件介绍及测试
疯壳MT7688 IOT无线路由器网关开发实战课程
疯壳IOT无线路由器网关开发实战2.1. 开发环境搭建——虚拟机和常用工具(vim、ssh、samba)的安装和配置
疯壳IOT无线路由器网关开发实战3.1. shell编程基础——linux脚本编程基本概念
疯壳-IOT无线路由器网关开发实战
疯壳MTK智能穿戴开发实战之入门-(2)MTK 平台介绍
疯壳IOT无线路由器网关开发实战4.2. 应用程序的编写和编译
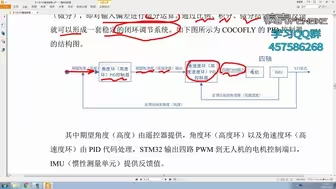
疯壳AI开源编队无人机开发实战 2-10 PID基础原理
疯壳IOT无线路由器网关开发实战2.2. 开发环境搭建——Vbox导入一个已经安装好的vdi文件并重新设置UUID
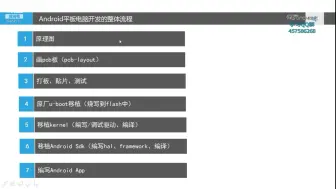
第四章 OpenWrt开发实战 1.如何更换原生logo
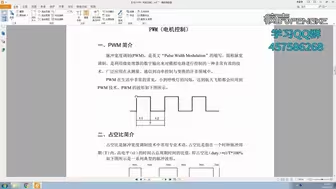
疯壳AI开源编队无人机开发实战 2-9 PWM(电机控制)
疯壳开源Android嵌入式Linux开发实战5 驱动程序编写
第四章 OpenWrt开发实战 2.应用程序的编写和编译
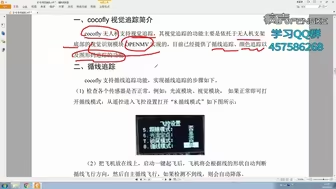
疯壳AI开源编队无人机开发实战 4-5 视觉追踪
疯壳智能硬件开发实战蓝牙手表7_NFC
疯壳AI开源编队无人机开发实战 4-1 飞控整机代码走读、编译与烧写
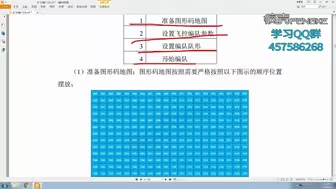
疯壳AI开源编队无人机开发实战 4-7 编队飞行合成
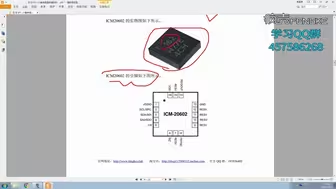
疯壳AI开源编队无人机开发实战 2-6 SPI(六轴传感器数据获取)
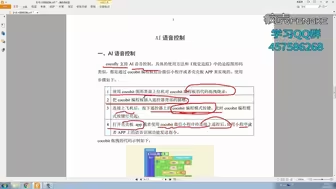
疯壳AI开源编队无人机开发实战 4-6 AI语音控制
疯壳开源Android嵌入式Linux开发实战1 最新职业现状、学习规划及基础准备
疯壳AI开源编队无人机开发实战 2-8 I2C(激光测距)
疯壳智能手环开发实战1-9不带屏_步伐同步
疯壳MTK之智能穿戴开发实战之入门-(5)入门
疯壳智能手环开发实战2-8带屏手环_收发实验
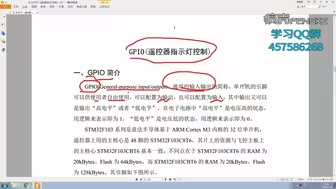
疯壳AI开源编队无人机开发实战 3-1 GPIO(遥控器指示灯控制)
疯壳四合一健康智能手表开发实战 5 LCD屏幕显示
疯壳MTK智能穿戴开发实战之入门-(3)编译指令-1
疯壳人形街舞机器人开发实战 4.舵机基本控制
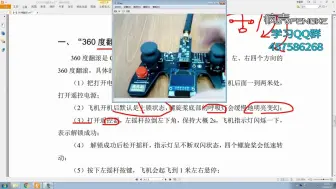
疯壳AI开源编队无人机开发实战 4-4 360度翻滚
疯壳智能手环开发实战2-1带屏手环_需求分析
疯壳MTK智能开发实战项目篇(2)MTK6260屏幕显示
第一章 快速上手篇 1.开发套件介绍及测试
疯壳四合一健康智能手表开发实战 1整机功能演示
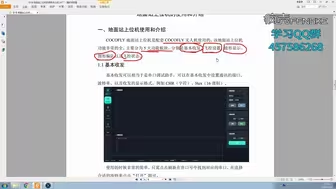
疯壳AI开源编队无人机开发实战 1-6 地面站上位机的使用和介绍
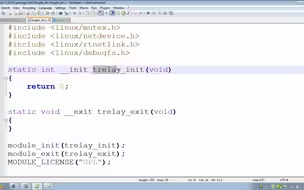
第四章 OpenWrt开发实战 3.驱动程序的编写和编译
疯壳智能手环开发实战1-1_不带屏手环_需求分析
疯壳智能手环开发实战1-8不带屏_收发实验
疯壳智能手环开发实战1-2不带屏手环_GPIO
疯壳人形街舞机器人开发实战 3.调试软件简介