V
主页
京东 11.11 红包
(三)BEV视觉的端到端模型【loss函数】
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
(三)BEV视觉的端到端模型【代码】【geometry的产生】
(三)BEV视觉的端到端模型【代码】
(三)BEV视觉的端到端模型
(三)BEV视觉的端到端模型【原理】【体素化与bev映射】
(三)BEV视觉的端到端模型【改进】
BEV感知分割深度学习训练
(六)GRU模型
(三)BEV视觉的端到端模型【ST-P3整体概述】
(七)可变形卷积
SolidWorks绘制机器人模型
SolidWorks建模题
规划控制(二阶系统的传递函数)
第6章,最大熵模型
(四)nuScenes数据集
windows安装anaconda学习使用opencv- python
4数码管和0x进位制
(二)纯视觉目标先知BEV感知
六、你的记忆
23Web控制和esp_cam
SolidwWorks绘制机器人模型教学(2)
32使用STM-CUBE实现HAL库点灯【立创训练营】
11LCD1602
SolidwWorks绘制机器人模型教学(1)
slam理论(3)
(一)mask-rcnn【代码】
(一)mask-rcnn
18无刷电机FOC原理
魔豆如果中间连轴更有意思
3C51的P2引脚流水灯
【四】nuScenes数据集
14I2C通信,SPI通信,串口通信
27mpu6050采集数据在vofa上的可视化
17pid控制
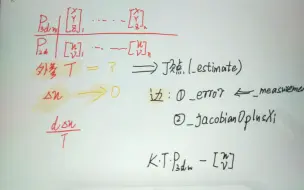
SLAM(2)迭代求解位姿(g2o库)
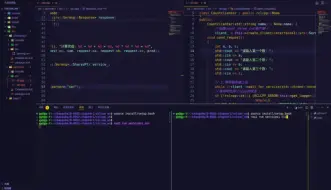
ROS2-服务机制
29滴答定时器和下载器接线方式
(五)DETR3D前向传播过程
三级嵌入式第二套大题
零倍速感受slam的速度
34使用PWM控制GM6020舵机