V
主页
交互式信息事件订阅--基于PC SDK
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
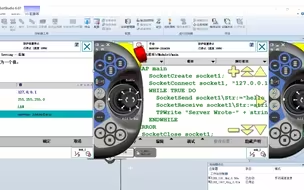
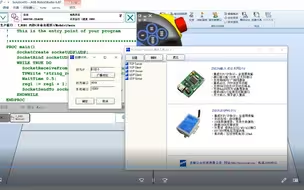
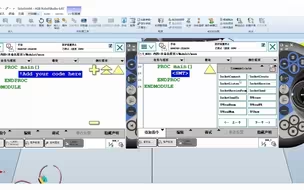
机器人套接字(Socket)通信(2)--Server端的建立
数据变化事件订阅--基于PC SDK
通过PC程序写入机器人数据--基于PC SDK
机器人IO信号订阅--基于PC SDK
PC应用程序如何读取机器人IO信号--基于PC SDK
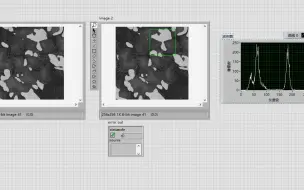
对ROI区域的灰度分析--LabVIEW Vision
外部软件控制程序启动及停止--基于PC SDK
灰度直方图的分析--LabVIEW Vision
PC应用程序读入机器人数据--基于PC SDK
“飞拍”的实现--机器人视觉程序编写
PC程序与机器人系统连接--基于PC SDK
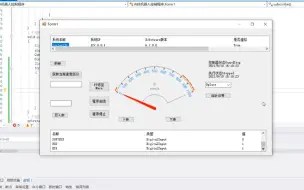
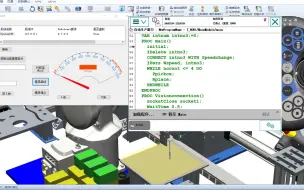
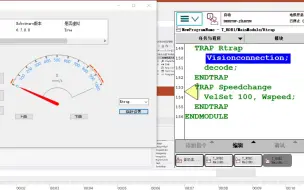
外部程序对TCP速度监控--基于PC SDK
程序指针选择设置--基于PC SDK
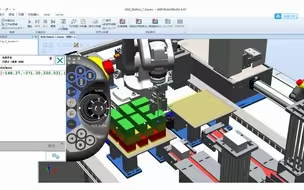
机械人视觉抓取程序编写(2)--坐标数据的获取
外部应用控制机器人上下电--基于PC SDK
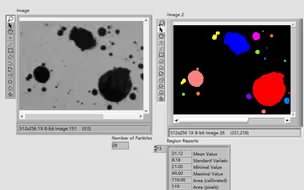
二值化标记实例--LabVIEW Vision
机械人视觉抓取程序编写(3)--坐标数据字符串的解析
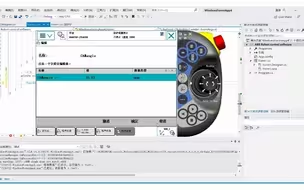
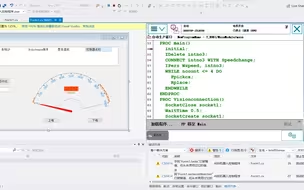
外部应用改变机器人TCP最大速度--基于PC SDK
图像校正的过程示例--LabVIEW Vision
机器人通信补充--Socket通信使用UDP协议
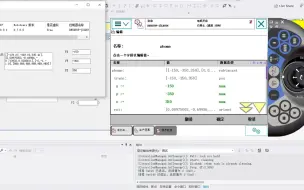
机器人套接字(Socket)通信 (3) --一次发送400个num型数据
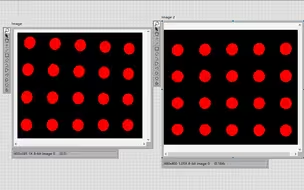
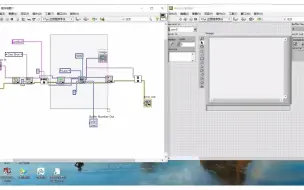
基于Labview vision的图像处理与分析
Snap图像采集实现方式(下)-使用Labview Vision 低层函数
视觉引导“焊、涂”应用程序编写--多轨迹应用的方法
Snap图像采集实现方式(上)-使用Labview Vision 高层函数
机械人视觉抓取程序编写(4)--解析坐标数据赋值机器人
机器人实操与编程(10)--码垛上料程序编写
先“抓”后“拍”的实现--修正TCP坐标方法
实战:利用ABB Studio搭建压铸仿真工作站(上)
机械手实操与编程(11)--物料中转机械手的编程
机器人实操与编程(13)--码垛形式编程的最后一节课
机械人视觉抓取程序编写(1)--与InSight通讯的建立
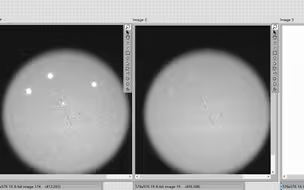
图像相减和绝对差--LabVIEW Vision
机器视觉(machine vision)--图像采集
实名举报github存放我网站盗版视频,免费给别人看。
机器人实操与编程(3)--六点法建立TCP坐标
一步一步玩转机器人虚拟仿真(2)
机器人实操与编程(7)--程序编写与调试
外部窗口显示(1)--LabVIEW Vision
机器人实操与编程(1)--手动操作