V
主页
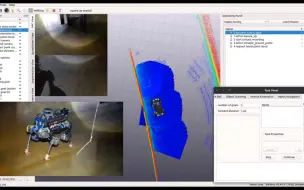
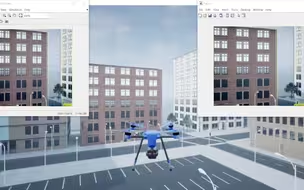
动态环境下机器人运动规划与控制有移动障碍物的无人机动画
发布人
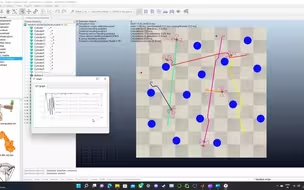
动态环境下机器人运动规划与控制以及带有移动障碍物的无人机动画是机器人技术领域的研究热点之一。在这种环境下,机器人需要根据传感器的数据进行实时控制,以避免与运动中的障碍物发生碰撞。 对于运动规划和控制,传统的方法是使用PID控制器或者其他控制算法来实现机器人的路径规划和控制。然而,在复杂的环境中,机器人需要考虑移动障碍物的影响,并且需要实时调整路径。 近年来,深度学习技术的发展为机器人的运动规划和控制提供了新的解决方案。使用深度学习模型,机器人可以通过学习复杂的环境和障碍物的运动模式来实现更加智能
打开封面
下载高清视频
观看高清视频
视频下载器
多机器人避障与路径规划
基于TD3强化学习算法解决四轴飞行器悬浮任务
具有深度强化学习的自适应交通控制
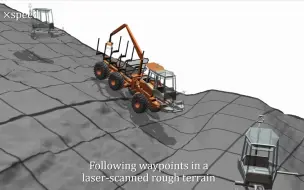
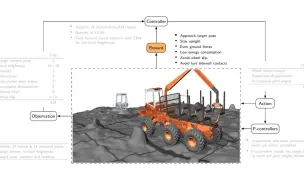
基于深度强化学习的崎岖地形车辆控制,实现自动运行完成货物对接
人工智能强化学习无人机防碰撞实验
基于强化学习的无人机控制避障训练
动态环境下机器人运动规划与控制有移动障碍物的无人机动画2
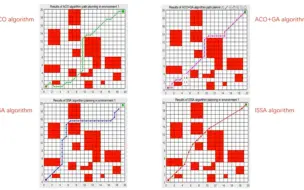
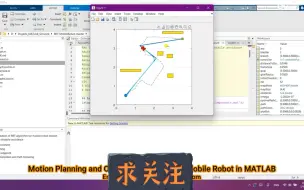
基于MATLAB的移动机器人运动规划与避障RRT算法
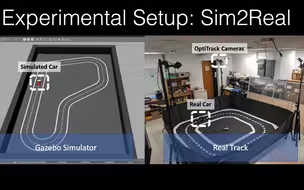
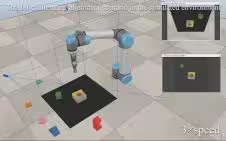
基于Sim2Real迁移的深度强化学习仿真实验
自监督深度强化学习用于机器人导航
基于强化学习的纸牌游戏应用
MarLio 马里奥的强化学习冒险
人工智能玩转游戏,小型迷宫逃脱
深度强化学习路径规划案例分享,期待未来能在交通控制和自动驾驶领域应用
用ROS、Gazebo和Simulink中的机器人系统工具箱进行四旋翼飞机控制和模拟
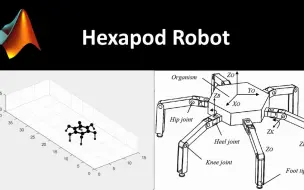
在MATLAB中模拟六足机器人
基于强化学习的端到端移动机械手的控制,实现全自动抓取
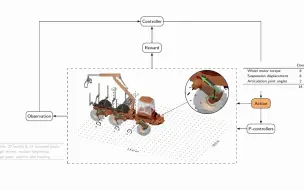
基于深度强化学习的挖掘机车辆控制,挑战在崎岖山地中工作任务
人工智能之基于深度强化学习算法玩转斗地主2
基于深度强化学习的1VS1的机器人PK
基于深度强化学习的机械臂位置感知抓取任务
用AI控制无人机(Python强化学习四轴飞行器)
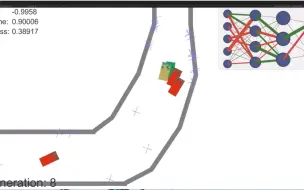
人工智能玩转游戏深度强化学习小汽车的训练
全新3D成像渲染虚拟现实技术and无人机人工智能机器人前沿应用
人工智能机器狗,运动策略引导的可遍历性学习 [IROS 2022]
深度强化学习之AI学习侧方倒车入库,你的科目二如何了
基于深度强化学习的挖掘机车辆控制,原理详解以及仿真展示
基于语言转换编码器和强化学习的语音控制机器人,
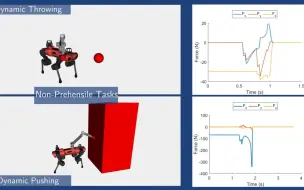
智能机器狗:全身动态运动与操纵的统一MPC框架
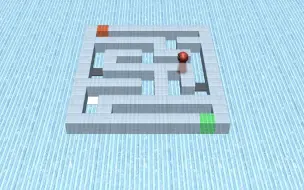
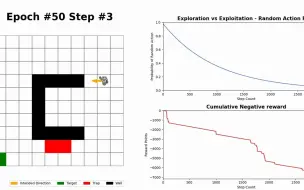
强化学习:基于Q-learning算法训练寻找迷宫的最优路径
人工智能学会在南极洲生存(深度强化学习挑战拾荒游戏)
百度世界大会4-秒哒发布-又要传IT技术员要失业了?高考选专业又要纠结了
人工智能:基于强化学习学习汽车驾驶技术
【人工智能】外力扰动下人工智能机器人如何进行稳固控制
吹爆!这可能是唯一能将搭建私有化应用讲清楚的教程了,环境搭建-模型准备-模型部署-api调用-知识库构建一条龙解读!草履虫都能学得会!人工智能|大模型
人工智能采用足式机器人对下水道混凝土劣化进行自主检测
人工智能:基于深度强化学习AI掌握瓶子翻转挑战
虚拟环境下基于深度强化学习的无人机路径规划训练含图像信息传递
人工智能强化学习:基于Unity开发生存游戏,
2024最新即插即用卷积模块MSPANet打败Resnet、SE、CBAM,CNN框架模型涨点!