V
主页
京东 11.11 红包
3分钟学会ROS2机器人导航Nav2的安装和使用
发布人
3分钟学会自动导航,ROS2和Nav2
打开封面
下载高清视频
观看高清视频
视频下载器
ROS2话题练习:让小乌龟画矩形
ROS2话题练习:让小乌龟走直线
《ROS 2机器人开发从入门到实践》6.4.1安装与使用Gazebo构建世界
使用ROS2-Control + RL来控制四足机器人
在isaaclab中开发viplanner端到端导航
机器人仿真Gazebo简介
Gazebo和ROS2的六足机器人的步态仿真与实现
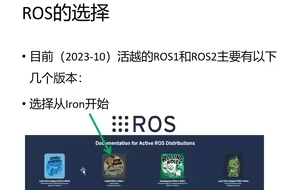
十分钟的ROS2安装方法
使用ROS2-Control + OCS2来控制四足机器人
Gazebo Harmonic GUI功能简介
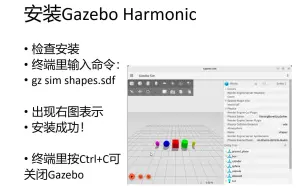
Gazebo Harmonic的安装
ROS2让小乌龟螺旋运动
什么??我们的机器人也会看路了!!!自主导航与避障全新体验~
机器人模型的选择urdf,xacro,sdf
ROS,rqt,Rviz和Gazebo的关系
Gazebo Harmonic内置模型以及sdf格式简介
使用urdf在ROS2中构建四足机器人的Gazebo和Mujoco仿真
Gazebo Harmonic sdf学习——构建轮式差速机器人(1)
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
Gazebo 轮式机器人巡线(1)简介
《ROS 2机器人开发从入门到实践》7.2.1构建第一章导航地图
《ROS 2机器人开发从入门到实践》6.5.2使用 Gazebo 接入 ros2_control
《ROS 2机器人开发从入门到实践》6.4.4 使用两轮差速插件控制机器人
《ROS 2机器人开发从入门到实践》6.5.1ros2_control介绍与安装
从glb复杂格网创建Gazebo3D模型
Gazebo Harmonic sdf学习——构建轮式差速机器人(3)话题与控制
《ROS 2机器人开发从入门到实践》6.4.3 使用Gazebo标签扩展URDF
《ROS 2机器人开发从入门到实践》5.4.1常用可视化工具rqt
《ROS 2机器人开发从入门到实践》6.2.2 在RViz中显示机器人
Dummy2 机械臂全新升级谐波无刷电机版 - 开箱指南之一 硬件部分
轮足机器人|平衡步兵动态障碍物导航避障
Fast LIVO 硬同步过程释疑
调速转台制作
谨以此短视频致敬稚晖君发布并开源Dummy机械臂三周年
微雪 UGV Rover 和 UGV Beast安装Jetson Orin和电池教程
《ROS 2机器人开发从入门到实践》6.4.5 激光雷达传感器仿真
花了一个学期打造的初代建图导航坤,结果竟然这样……(上上学期)
Arduino导弹防御雷达系统教程
《ROS 2机器人开发从入门到实践》6.2.3使用Xacro简化URDF
《ROS 2机器人开发从入门到实践》6.4.2在Gazebo中加载机器人模型