V
主页
2-6 工具坐标系三点示教《FANUC工业机器人离线编程与应用》配套微课视频
发布人
《FANUC工业机器人离线编程与应用》 黄维 余攀峰 编著 机械工业出版社出版 ISBN:978-7-111-66131-3 ROBOGUIDE、KAREL编程、SOCKET通信、维护调试,一本书让您全面入门FANUC机器人! 课程概要: 本微课为教材配套的第一版视频,第二版微课正在制作中,精彩视频不断呈现~ 本次课程简要介绍如何使用三点法设置工具坐标系,相较于六点法,其只改变位置信息而不改变姿态信息。 更多线下课程,欢迎报名参加“湖北轻工职院——FANUC机器人授权培训中心” 通过理论及实操考核将获得由上海发那科机器人有限公司颁发的培训证书! 学习工业机器人集成应用,就来“湖北轻工职院——双元职教(北京)科技有限公司职教研究中心”
打开封面
下载高清视频
观看高清视频
视频下载器
5-12 工业机器人零点标定(零点复归),对机器人运动影响很大!《FANUC工业机器人离线编程与应用》余攀峰 编著机械工业出版社
FANUC工业机器人I/O类型及分配方式,是选择自动?还是手动?!《FANUC工业机器人离线编程与应用》教材配套微课
5_4 FANUC工业机器人与S7-1200系列PLC I/O通信案例,请根据实际情况配置《FANUC工业机器人离线编程与应用》余攀峰 编著 机械工业出版社
2-5 工具坐标系六点示教《FANUC工业机器人离线编程与应用》配套微课视频
6-1 RSR?PNS?区别?工业机器人自动运行概述《FANUC工业机器人离线编程与应用》余攀峰 编著 机械工业出版社 978-7-111-66131-3
《FANUC工业机器人离线编程与应用》微课视频:7-1 KAREL入门,想实现更多的功能?或许FANUC工业机器人的底层开发就从这里开始~
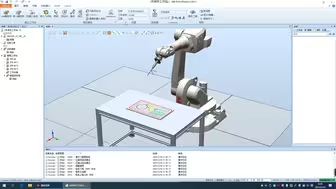
4-7-1 使用OFFSET偏移指令和WAIT等待指令优化ROBOGUIDE动画仿真《FANUC工业机器人离线编程与应用》配套微课视频
《FANUC工业机器人离线编程与应用》配套微课:工业机器人I/O控制,I/O类别?程序控制方法?互补又是啥?RI/RO的控制方法来了~
3-3 FANUC工业机器人程序管理《FANUC工业机器人离线编程与应用》配套微课视频
5-1-10 后台逻辑!FANUC工业机器人中的PLC!简单的逻辑只需使用它即可,无需额外的PLC啦~《FANUC工业机器人离线编程与应用》配套微课视频
3-4 TP程序的修改方法《FANUC工业机器人离线编程与应用》配套微课视频
3-6 位置寄存器要素指令PR[i,j]《FANUC工业机器人离线编程与应用》配套微课视频
FANUC工业机器人的组成
PLC与FANUC机器人Modbus TCP通信
ABB工业机器人RobotStudio轨迹涂胶离线编程与仿真
FANUC工业机器人Modbus TCP通信
FANUC工业机器人程序架构:CALL指令+自变量寄存器AR
6_4 FANUC工业机器人PNS自动运行参数设置《FANUC工业机器人离线编程与应用》黄维 余攀峰 编著 机械工业出版社 978-7-111-66131-3
3-10 用户自定义的报警,内容?级别?《FANUC工业机器人离线编程与应用》配套微课视频
4-3 ROBOGUIDE中机械手仿真设置《FANUC工业机器人离线编程与应用》配套微课视频
FANUC工业机器人镜像备份与还原,进入控制模式和Boot Monitor方式《FANUC工业机器人离线编程与应用》黄维 余攀峰 编著 机械工业出版社
郑鼎侯俊霞工业机器人课程 从入门到精通 第3节:工业机器人的品牌
4-4 无条件跳转指令,JMP和CALL的综合性应用《FANUC工业机器人离线编程与应用》配套微课视频
7-3 KAREL程序的调试方法《FANUC工业机器人离线编程与应用》配套微课视频
程序名前缀设置《FANUC工业机器人离线编程与应用》教材配套微课视频
保姆级教程!通过SIMULATION功能将ROBOGUIDE中的离线程序导入到FANUC实体工业机器人,调整工具坐标系及用户坐标系后就可以运行啦~
8-6 发那科2D视觉固定在机械手手腕部,机器人抓取相机方式的设置《FANUC工业机器人离线编程与应用》余攀峰 主编ISBN:978-7-111-66131-3
3-12 使用存储介质U盘实现程序的导入及导出,没有网络也可以进行程序的管理《FANUC工业机器人离线编程与应用》配套微课视频
FANUC机器视觉遮罩功能的使用方法以及自动生成视觉程序《FANUC工业机器人离线编程与应用》 黄维 余攀峰 编著 机械工业出版社出版
6-7 工业机器人码垛堆积E,更加复杂的码垛造型就要使用E类型《FANUC工业机器人离线编程与应用》余攀峰 主编 ISBN:978-7-111-66131-3
《FANUC工业机器人离线编程与应用》微课视频:2-4 创建离线工作站,打造属于您的机器人空间
3-7-1 综合性计算!位置寄存器指令和位置寄存器要素指令的综合性应用!《FANUC工业机器人离线编程与应用》配套微课视频
8-1 FANUC机器人2D视觉入门课程,Roboguide中就可以仿真实现,实体也可以这样《FANUC工业机器人离线编程与应用》余攀峰 编著 机械工业出版社
6-8 PLC获取机器人工作状态:基准点、UOP、DO数字信号《FANUC工业机器人离线编程与应用》余攀峰 编著 ISBN:978-7-111-66131-3
3-2 FANUC工业机器人程序示教方法《FANUC工业机器人离线编程与应用》配套微课视频
FANUC工业机器人与PLC的Modbus双向通信
2-4-2 Part工件模块的设置《FANUC工业机器人离线编程与应用》配套微课视频
6-5 发那科2D机器视觉颜色识别《FANUC工业机器人离线编程与应用》黄维 余攀峰 编著 ISBN:978-7-111-66131-3 机械工业出版社 出版
ABB工业机器人RobotStudio搬运码垛离线编程与仿真
7-5-1 KAREL程序中位置的计算,直角坐标系和关节坐标系的函数及数据类型均不相同《FANUC工业机器人离线编程与应用》 配套微课 黄维 余攀峰 主编