V
主页
大坡口➕多层焊缝
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
多层焊缝➕寻位
汽车轮毂上下料
地轨➕快换
第十四期:示教点的区别
第二十一期:示教点设为备注
第十七期:码垛,拆垛
第二十期:回机器人本体原点
第十六期:程序偏移
第十九期:示教点偏移
第十八期:工具偏移
第二十二期:区分启动方式
角焊接寻位的多层多道程序案例
轻松时刻:4iA的码垛搬运
发那科机器人焊接
视觉零点标定
能负载1700公斤的大型发那科机器人
第十二期:wait指令的详细用法
第二期:镜像备份和全备份
第十三期:wait超时的时间设定
的十五期:机器人快速回原点
第八期:机器人的io点
第九期:发那科洛克端子
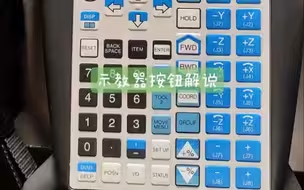
第五期:示教器按钮解说
发那科机器人跟视觉的配合工作
第三期:恢复镜像备份
机器人码垛
码垛➕地轨
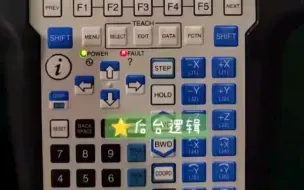
第十一期:后台逻辑
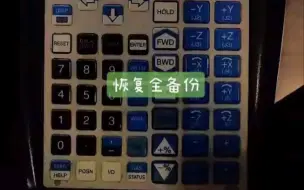
第四期:恢复全备份
发那科机器人柔性和重复定位精度
第七期:创建用户坐标
第一期:发那科机器人密码设置
2台210L的码垛搬运
发那科机器人添加外步轴
库卡汽车领域的应用
第十期:恢复零点标定
第六期:工具坐标系的创建
并联机器人➕视觉
码垛搬运
发那科模拟点焊弧焊