V
主页
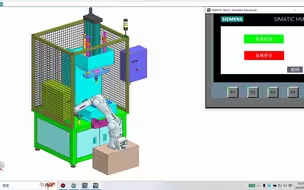
机器人压装工作站-4
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
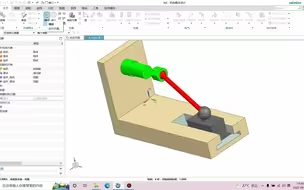
机器人压装工作站
机器人压装工作站-3
机器人压装工作站5-加热器控制.mp4
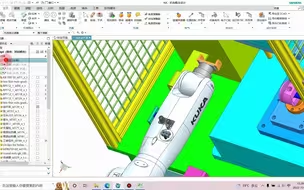
机器人压装工作站6-机器人路径1
压装工作站8
机器人压装工作站-2
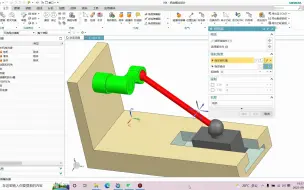
机器人压装工作站7-机器人路径2-3-夹具夹具控制
机器人压装工作站-1
自动涂胶演示
0-三轴联动运动控制算法展示
自动涂胶机
10、螺旋副、力、力矩、弹簧阻尼器
第7讲 电位的概念
9.力矩控制-弹簧阻尼器
13-交流电的相量表示.mp4
8.力控制-2
循环中断
2024外骨骼与人型机器人开发者大会(第一天)
13-多段直线副
6.球面副
12-交流电的认知-习题.mp4
第8讲 电位的计算
1-模型1:刚体、碰撞体
第14讲 星、三角连接的转换(2)、电压源电流源概念
第13讲 星、三角连接的转换(1)
16-基尔霍夫定律的相量式推导
7.力控制
28-for循环
第27讲 电感的作用机理及数学模型推导
第41讲 相量图及正弦波形的画法
第9讲 第一章作业讲解(1)
3-模型2:刚体、碰撞体、传送带练习
第19讲 戴维宁定理与诺顿定理的理解
第21讲 第二章作业讲解(1)
15-创建联合体进行位操作
12-点在线上副、做空间曲线的方法
第3讲 欧姆定律
第10讲 第一章作业讲解(2)
18-复阻抗-2
2-模型1:补充