V
主页
京东 11.11 红包
开放式激光振镜运动控制器(一):ZMC408SCAN接口介绍
发布人
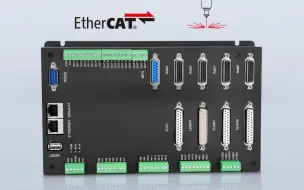
ZMC408SCAN是正运动技术新推出的一款支持EtherCAT总线的开放式激光振镜运动控制器,专为工业激光+振镜+运动控制方面的应用而设计。通过EtherCAT总线和脉冲轴接口能实现多轴运动控制。
打开封面
下载高清视频
观看高清视频
视频下载器
开放式激光振镜+运动控制器(三):振镜矫正
视频教程:EtherCAT总线运动控制器应用进阶一
开放式激光振镜运动控制器:C++振镜矫正方法与实现
开放式激光振镜运动控制器(四):ZMC408SCAN振镜控制光纤激光器加工
开放式激光振镜+运动控制器(二)-硬件接口
正运动技术视频教程:运动控制器多轴插补运动指令的使用
快速入门丨篇十:运动控制器多任务运行特点
开放式激光振镜运动控制器在Ubuntu+Qt下CAD图形标刻
EtherCAT运动控制器之ZMIO300模块的使用
开放式激光振镜运动控制器在Ubuntu+Qt下的文本标刻
【运动控制+机器视觉Demo软件框架系统概述】实训平台调试视频
运动控制器的自定义G代码编程应用
视频教程:运动控制器激光振镜控制
正运动技术视频教程:正运动技术运动控制器U盘接口的使用
探索高精密激光加工控制核心 开放式激光振镜运动控制器ZMC408SCAN-V22
运动控制器位置锁存功能的应用
视觉同步点胶系统——可在运动状态中实现同步跟随加工
正运动技术视频教程:正运动技术脉冲型运动控制器的使用
开放式激光振镜+运动控制器(六)-双振镜运动
视频教程:正运动技术运动控制器ZDevelop 编程软件的使用
正运动技术视频教程:如何进行运动控制器ZBasic程序开发?
正运动技术视频教程:如何进行运动控制器ZPLC程序开发?
正运动技术视频教程:运动控制器MODBUS通讯
【运动控制+机器视觉Demo软件框架系统概述】主界面调试视频
ZMC408SCAN高精度多轴联合的同步激光加工控制提高产能
正运动技术视频教程:正运动技术运动控制器中断的应用
x86平台实时Windows机器视觉EtherCAT运动控制器VPLC711
运动控制器PSO位置同步输出(一)硬件环境搭建
正运动技术EtherCAT运动控制边缘控制器ZMC432H接口介绍
EtherCAT运动控制器上位机开发之Python+Qt(二):回零
正运动运动器视频教程:运动控制器基础轴参数与基础运动控制指令
EtherCAT运动控制器上位机之Python+Qt(一):链接与单轴运动
正运动技术自主研发MotionRT7--功能配置介绍
仿真器读写文件
正运动技术视频教程:运动控制器多轴同步与电子凸轮指令简介
开放式激光振镜运动控制器在Ubuntu+Qt下的激光振镜校正
EtherCAT运动控制器上位机开发之Python+Qt(三):PDO配置与SDO读写
正运动技术视频教程:正运动控制器EtherCAT总线快速入门
开放式激光振镜+运动控制器(一)-硬件接口
矢量图形打标