V
主页
第9课-ethercat总线运动控制2_信捷PLC工程师培养计划
发布人
总线常用指令、标志位复习 总线常见问题解答(数据类型FP64、单位u、 pdo下载失败、轴参数不生效、回原、SD8000=K8、绝对值编码器回原) 伺服气缸搬运程序(脉冲改总线) 3种速度曲线(示波器采集) 加速度、加加速度的计算 总线轴组(插补)、电子齿轮、电子凸轮介绍 总线指令如何选择
打开封面
下载高清视频
观看高清视频
视频下载器
第8课-EtherCAT总线运动控制1_信捷PLC工程师培养计划
信捷PLC脉冲定位控制完成的3种程序写法
信捷PLC FB功能块直播回放2
第4课-脉冲运动控制_信捷PLC工程师培养计划
第6课-modbus RTU通信_信捷PLC工程师培养计划
第2课-软元件 指令 数据类型_信捷PLC工程师培养计划
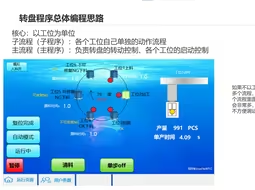
第10课-程序框架 6工位转盘机_信捷PLC工程师培养计划
信捷PLC脉冲定位控制,用INC指令代替定时器,提高效率#plc #信捷plc
信捷PLC FB功能块直播回放1
信捷C语言案例,比梯形图方便很多
关于信捷PLC的上升沿,可能老工程师都会有疑惑
第3课-程序框架 交通灯的4种写法_信捷PLC工程师培养计划
第7课-modbus tcp通信_信捷PLC工程师培养计划
信捷PLC脉冲指令及脉冲插补培训直播回放1
第1课-软件 硬件_信捷PLC工程师培养计划
信捷PLC总线指令及轴组培训直播回放1
信捷PLC脉冲运动控制,流程跑完了,轴没有动?这个小技巧轻松解决!
信捷PLC控制NX MCD丝杆模型正反转#plc #ug #机械
信捷PLC电子凸轮飞剪直播回放下
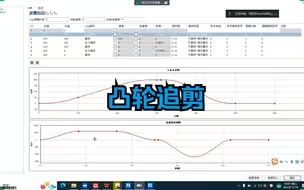
信捷PLC电子凸轮追剪直播回放(前面30多分钟)
第5课-程序框架 伺服气缸搬运程序_信捷PLC工程师培养计划
5分钟学会信捷PLC C语言for循环,总线运动控制到位置区间判断
信捷PLC电子凸轮追剪直播回放下
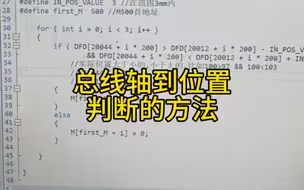
20 、信捷PLC总线运动控制到位置判断的方法
总线绝对值伺服零点的标定,再也不用传感器回原了
信捷PLC FB功能块直播回放3
信捷PLC电子凸轮追剪直播回放上
信捷PLC电子凸轮飞剪直播回放上
19、 3轴运动控制程序讲解
11、 信捷PLC A_ZRN回原
1、2小时上手信捷ethercat总线前言
信捷华南信捷PLC C语言培训直播回放2 进阶部分
信捷华南信捷PLC模拟量、PID功能培训1
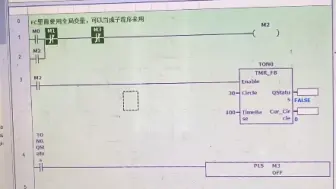
用fc当子程序来调用,实现不同项目的复用,有这样用的朋友不#工控 #plc #信捷PLC
信捷PLC软元件X、Y、D、M
PLC总线连续插补第2步不走了?延时一下看看
信捷PLC EtherCAT总线轴控软限位调试技巧,C语言for循环案例
古董信捷xc系列的PLC,什么原因让你不舍得换呢?
7、codesys运动控制:MC_HOME回原的配置
信捷PLC总线到位置判断的方法,c语言位置比较