V
主页
京东 11.11 红包
UWB测距实现位姿估计 实现移动机器人位置与姿态估计 0.5m/s下,约3cm平均定位误差 4°平均角度误差 港中深吴均峰教授团队
发布人
单靠UWB测距,在0.5m/s平均速度下,实现移动机器人约3cm平均定位误差, 4°平均角度误差。 这项研究来自香港中文大学(深圳)数据科学学院吴均峰教授团队,相关成果在机器人学顶级会议ICRA发表题为 Efficient Planar Pose Estimation via UWB Measurements的文章,采用UWB超宽带无线电技术(LinkTrack UWB高精度测距、定位系统)的距离测量功能,实现了平面移动机器人的实时高精度位姿估计,有效避免了机载传感器的位姿估计模块容易产生长期轨迹的漂移,并且在特定环境下鲁棒性较低问题,详细介绍见此推文: https://mp.weixin.qq.com/s/s5TB4HyG0cC9q9eESDEKHQ
打开封面
下载高清视频
观看高清视频
视频下载器
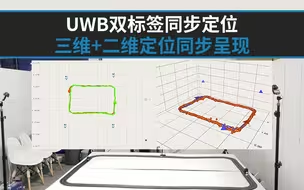
UWB双标签同步定位,三维+二维定位同步呈现,LinkTrack测距定位系统
UWB测距 浙大Fast-Lab博导高飞团队 野外全自主微型飞行机器人集群 Science Robotics封面
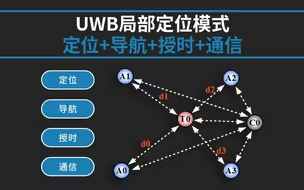
LinkTrack UWB测距定位系统局部定位模式 定位+导航+授时+通信
UWB动态定位精度有多高?小车几十圈运动轨迹几乎与轨道重合!
UWB基站一键标定有多高效?一键搞定UWB基站坐标,LinkTrack测距定位系统
UWB基站间遮挡无影响?
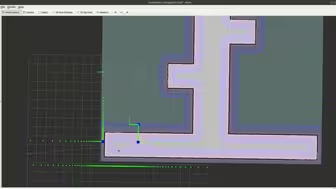
2d slam-移动机器人自主全局重定位展示
UWB户外树木、人员遮挡定位,双定位标签效果优异!
LinkTrack UWB测距定位系统数传模式 广播+双向+智能
案例 | VR-SLAM:UWB&单目相机定位 低成本低功耗移动机器人定位方案 快速恢复跟踪失效 无闭环也轻松获取全局地图 新加坡南洋理工大学
大负载室内差速移动机器人 CR100
案例 | UWB助力机器人大赛 RoboMaster机甲大师 LinkTrack测距定位系统 超宽带室内定位
TOFSense-M激光测距传感器级联测距演示 激光雷达、TOF测距雷达、机器人避障、工业测量
LinkTrack UWB测距定位系统分布式测距模式 测距+授时+通信
机器视觉机器人海康
Nooploop空循环 祝:七夕快乐!有情人终成眷属~LinkTrack UWB测距定位系统
UWB基站包络面外能定位?小空在包络面外2倍的位置,定位轨迹依然精准
投棒球演示的机器人Torobo
案例 |无人机集群编队表演-LinkTrack UWB测距定位系统
买机器人不如自己造机器人
工业机器人如何学?什么时候学?郑鼎侯老师ABB工业机器人视频
DOM-60 为机器人带来前所未有的感知能力
四转四驱 强悍移动机器人底盘 FW-max
FR-max农业草地
此机械臂出售
自动化不同学历工资水平
负载可达1吨的Scara 机器人,由安川机器人推出。
【中英精校】走进领先的机器人仓库,Brightpick机器人是全球唯一可以在仓库过道内像人类用手推车一样自动拾取和整合订单的自主移动机器人
案例 | AOA跟随小车3,LinkTrack AOA跟随系统,多车跟随
如果你30+一定认真看完
SCARA机器人,高速上下料
大规模出海——新松移动机器人“黑科技”
把我机械臂用到的谐波减速器分享给大家
IPS室内定位系统解决方案 UWB高精度定位
自动化厨子的自我修养
哪怕再顶尖的算法用圆弧拟合出来的直线也干不过真实的单轴直线运动…机器人跑小线段是干不过cnc的…
高薪挖来的工程师只会摇人
三次元机械手:三次元机械手在冲压生产线中的应用
遥操作孪生协作臂
拧动新产业,舞动协作路