V
主页
京东 11.11 红包
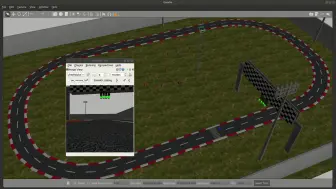
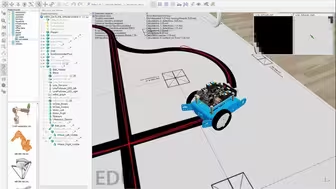
ROS2和Gazebo9中mobot跑道环境仿真测试
发布人
ROS2和Gazebo9中mobot跑道环境仿真测试 使用键盘遥控,车载摄像头赛道信息可视化,如何实现自主驾驶呢? 人工智能?还是经典控制?
打开封面
下载高清视频
观看高清视频
视频下载器
ROS2和Gazebo9中mobot室内环境仿真测试
Autoware和ROS2课程讲座1 开发环境
ROS2和Gazebo9中mobot物体跟随仿真测试
ROS 2和Gazebo 9中mobot多机器人图书馆环境仿真案例
ROS2和Gazebo9中mobot速度发布和坐标订阅
ROS2和Gazebo9中mobot服务示例
ROS2和Gazebo9中mobot实践案例
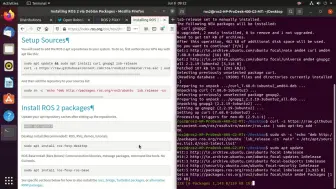
ROS2基础1-安装和配置
ROS2RMF
ROS2Multirobot
高通机器人RB5平台全面支持5G-AI-ROS2-Linux技术
机器人实践课程镜像设计与使用-ROS2Go-
TurtleBot3 ROS2 快速上手 Foxy
turtlesim(ROS2)速度极限测试绘制问题展示
ROS2基础3-工区(Packages/Workspace)
Matlab之ROS1和ROS2工具箱简明介绍
ROS2机器人操作系统简介2021英文字幕版本
Autoware和ROS2课程讲座3 ROS2工具
全开源的ROS2SLAM机器人 ROSBOT - ROS2 open source SLAM robot
机器人工程专业实践镜像2021测试版ROS2部分
点云发布示例(ROS2+RViz2)全力致敬Matlab
ROS2基础4-节点(可执行文件)
Autoware和ROS2课程讲座2 ROS2基础
ROS2趣味题库之turtlesim魔幻步伐(轨迹类题型)(轨迹清晰)
ROS2机器人应用简明教程02安装
Ignition Citadel和ROS2讲座
ROS2基础2-工具(Turtlesim, CLI and Rqt)
ROS2机器人应用简明教程03工具
f1tenth高速跑圈1-局部规划缺陷
Autoware和ROS2课程讲座4 平台(HW, RTOS, DDS)
ROS2基础8-参数
ROS机器人虚拟仿真挑战赛本地电脑环境配置记录
ros1ros2urdf
turtlesim(ROS2)轨迹绘制
ROS2基础5-主题
Robotics Simulation V-REP
mBot simulation in V-REP line follower
ROS和ROS2借助智能大模型的学习和研究方法
Hello Cozmo 小合集
f1tenth高速跑圈2-局部规划缺陷