V
主页
京东 11.11 红包
道路分割与车道检测——1介绍与挑战
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【德国图宾根大学-自动驾驶课程】道路分割与车道检测——2道路分割
小白两个月快速入门图像分割方向的详细学习路线图!!!-深度学习/神经网络/计算机视觉
YOLOv11+双目立体匹配融合,进行实例分割、测距和点云重建!
西安交大提出无需训练的开放词汇遥感语义分割方法(今日Arxiv 10月3日)2024年10月3日Arxiv cs.CV发文量约105余篇,减论Agent
学完即可就业!一口气刷完3D点云、车道线检测、轨迹预测、三维重建、环境感知、深度估计、关键点特征匹配、行人重识别等八大自动驾驶算法与实战!真的比刷剧还爽!
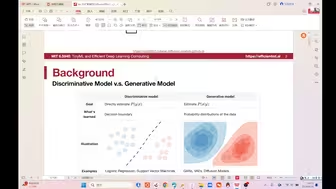
【MIT的模型压缩与优化课程】16.0DiffusionModel——扩散模型的基础
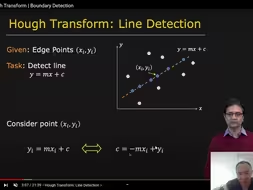
【哥伦比亚大学CV课程】014边缘检测——3霍夫变换检测直线和圆
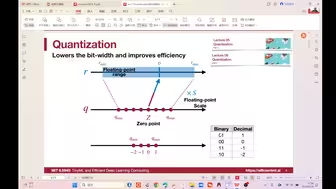
【MIT的模型压缩与优化课程】12.3Transformer和LLM——LLM的量化:SmoothQuant和AWQ
Ultralytics 代码框架解读 - 参数相关(上)| 默认参数有哪些?放在哪里 ?
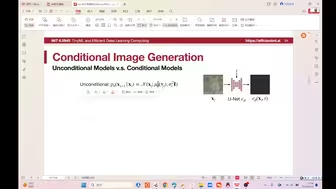
【MIT的模型压缩与优化课程】16.1DiffusionModel——带有条件的扩散模型
具身智能的风口到了吗
【哥伦比亚大学CV课程】016图像分割——1基于聚类的分割
工训赛物流小车视觉检测
最新FSD挑战纽约周末通行!大量场景对标国内,地狱难度!
【哥伦比亚大学CV课程】016图像分割——2KMeans算法和MeanShift算法
【哥伦比亚大学CV课程】016图像分割——3图割算法
【杜克大学——图像与视频处理】P48-视频分割工具:RotoBrush原理
【德国图宾根大学-自动驾驶课程】目标检测——2性能评估
【哥伦比亚大学CV课程】018人脸检测——1Haar特征与积分图
【德国图宾根大学-自动驾驶课程】目标检测——3滑动窗口与梯度方向直方图
里程计与SLAM——4BA与回环检测
YOLOV11环境搭建到模型训练、推理、导出一条龙实操!迪哥手把手教你基于YOLOV11训练自己的数据集,究极通俗易懂!(计算机视觉/目标检测)
【哥伦比亚大学CV课程】013边检测——2拉普拉斯算子检测边_高斯平滑
【哥伦比亚大学CV课程】013边检测——1梯度算子检测边
【德国图宾根大学-自动驾驶课程】目标跟踪——3数据关联
【MIT的模型压缩与优化课程】1.2课程介绍与引入——多模态与AI硬件分类
【哥伦比亚大学CV课程】014边缘检测——4泛化的霍夫变换
【德国图宾根大学-自动驾驶课程】重建与运动——3光流
马斯克的“豪赌”,科技业将“巨变”!
这位同学,人工智能算是被你玩明白了...老师快被气晕了!
【MIT的模型压缩与优化课程】18.0微调与提示词工程——LLM的微调:BitFit/Adapter/PromptTuning/PrefixTuning
【哥伦比亚大学CV课程】013边检测——3Canny算子
强推!这可能是导师都不讲的线性代数课程,不愧是麻省理工教授!花一周就能过线代,我愿称之为人工智能数学基础教程天花板!
num_workers 是如何并行加载数据的 ? pin_memory 又是如何省时的 ?
特斯拉新发布的机器人已经有点那啥了‼️
马斯克的Robotaxi是两年前百度水平,承认我们的技术领先真有那么困难吗
国内车企还敢遥遥领先?特斯拉的自动驾驶已经无方向盘了!
【MIT的模型压缩与优化课程】16.3DiffusionModel——DDIM与蒸馏剪枝量化
【MIT的模型压缩与优化课程】14.1EfficientVit——SegmentAnything和SwinTransformer和点云SparseVit
【杜克大学——图像与视频处理】P43-Otsu分割