V
主页
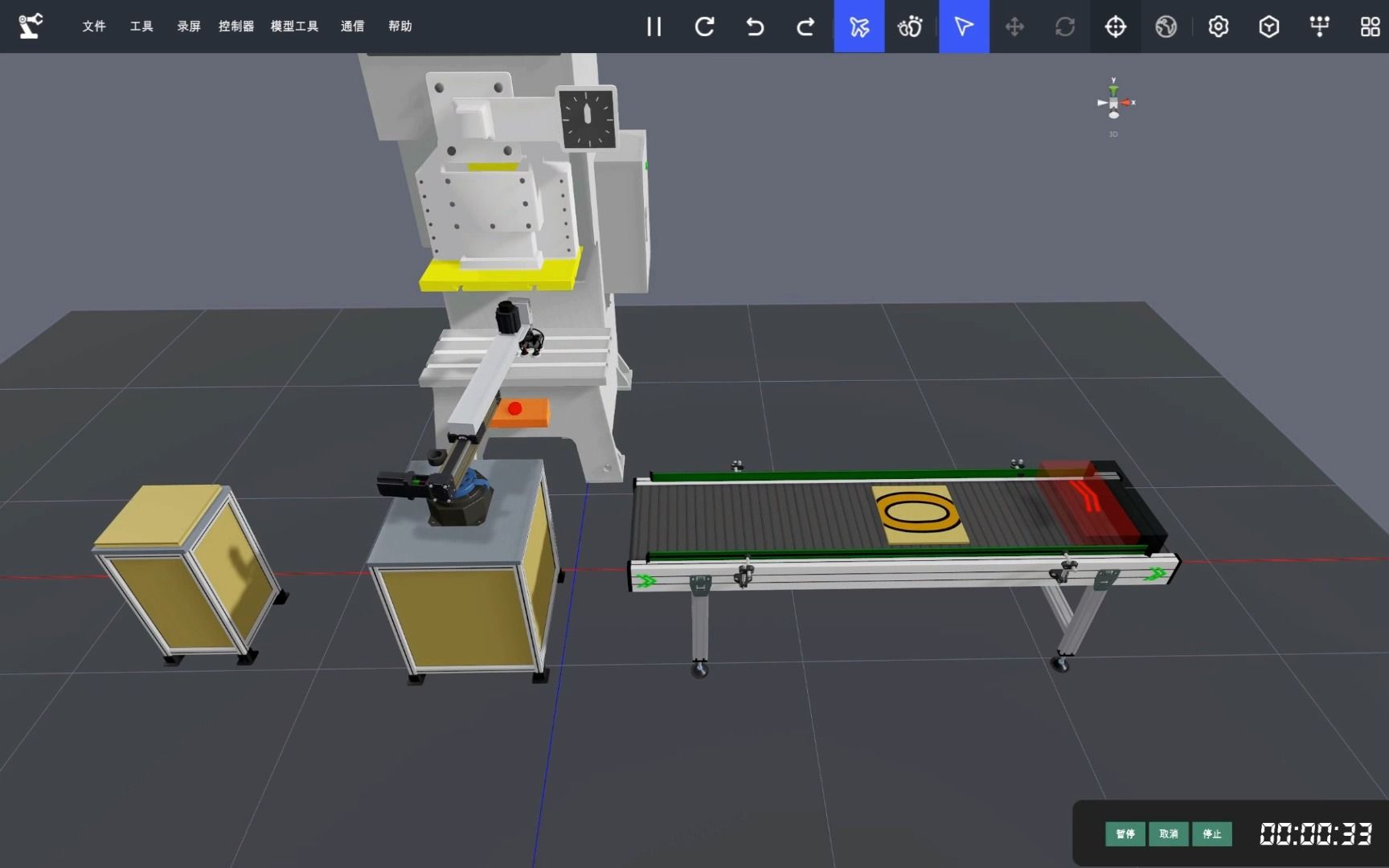
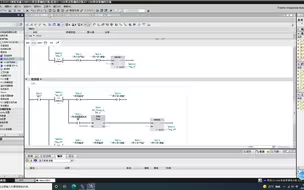
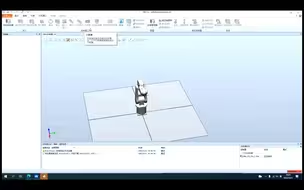
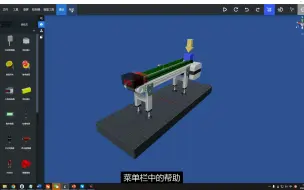
ZMC运动控制编程-冲压机器人搭建与仿真
发布人
ZMC运动控制编程案例 更多详情,访问www.ioaol.com
打开封面
下载高清视频
观看高清视频
视频下载器
机器人基础搬运模型建设
IOA数字孪生5.20版本基本操作
IOA软件基本三维操作
AUBO机器人基础搬运
S7-1200三轴龙门码垛
IOA5.20软件的基本界面认知
S7-1200气动机械手基础搬运
S7-1200传送带颜色分拣
IOA数字孪生ABB机器人仿真
基于KEBA控制器的六轴机器人码垛搬运
KEBA示教器系统模块常用指令讲解
正运动控制器功能说明
11-工业机器人示教编程的基本步骤
IOA功能模型的自定义导入设计
KEBA示教器运动模块常用指令讲解
10-工业机器人的运动指令
14-装配机器人的分类及特点
IOA软件设置及辅助功能使用
12-焊接机器人的分类及特点
IOA软件如何登陆和激活
9-工业机器人的位置控制
案例搭建-IOA视觉基础自动化物流场景搭建
二自由度气动机械手的结构设计与仿真
KEBA示教器系统功能模块常用指令讲解
IOA数字孪生智能制造仿真
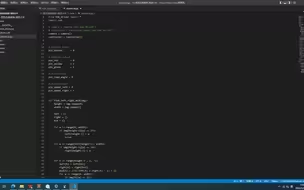
人工智能Python视觉仿真-循迹小车
IOA连接傲博控制器
2-工业机器人的系统组成
13-涂装机器人的分类及特点
6-工业机器人传感器的应用
IOA连接纳博特虚拟控制器
(西门子PLC)模拟量输入控制电机转速
零基础精通Unity数字孪生-智慧城市系统-第二季
KEBA虚拟示教器按键介绍
IOA-V6.0仿真软件操作教程
人工智能Python视觉仿真-KATA位置识别
Pyteach编程-传送带颜色分拣
(西门子PLC)自动运料小车运行控制
上下料加工实训台
3-工业机器人的机械结构及功能