V
主页
10-工业机器人的运动指令
发布人
主要介绍: 1、了解工业机器人的运动指令的类型 2、掌握各运动指令的功能
打开封面
下载高清视频
观看高清视频
视频下载器
11-工业机器人示教编程的基本步骤
5-搬运与码垛机器人的分类与特点
9-工业机器人的位置控制
机器人视觉分拣实验
4-工业机器人的控制器
12-焊接机器人的分类及特点
机器人基础搬运模型建设
气动机械手二自由度PLC控制
KEBA虚拟示教器按键介绍
IOA六轴工业机器人基础搬运
8-工业机器人的离线编程
IOA中虚拟机器人基础示教
IOA4.0与机器人虚拟控制器连接
智能工厂运行效果视频
协作机器人多功能仿真
KEBA示教器运动模块常用指令讲解
32 S7-1200_ 置位_复位指令
基础传送带与机器人上下料控制
气动机械手
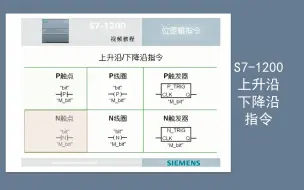
31 S7-1200_ 上升沿_下降沿指令
基于KEBA控制器的六轴机器人码垛搬运
python机器人视觉筛选
纳博特机器人与PLC机床上下料
自动化数控产线MES系统集成
正运动模板使用视频
智能交通人工智能技术的创新与仿真教学
ABB机床上下料
42 S7-1200_ 基本逻辑运算指令
7立体仓储系统远程modbus调度
机器人STEM教育3.0时代——VS-Robot
七轴机器人集成上下料
数控机床机器人自动化(常熟职教中心项目)
KEBA示教器信号模块常用指令讲解
六轴机器人的自动化包装
七轴机器人数控加工中心上下料实验讲解
气动机械手颜色分拣
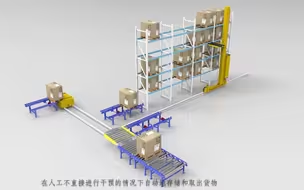
001基于移动互联的智能仓储系统
KATA机器人基础搬运
33 S7-1200_ 接通延时定时器
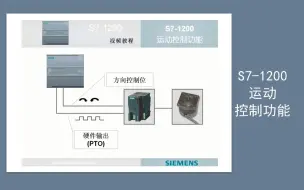
55 S7-1200_ 使用S7-1200的运动控制功能