V
主页
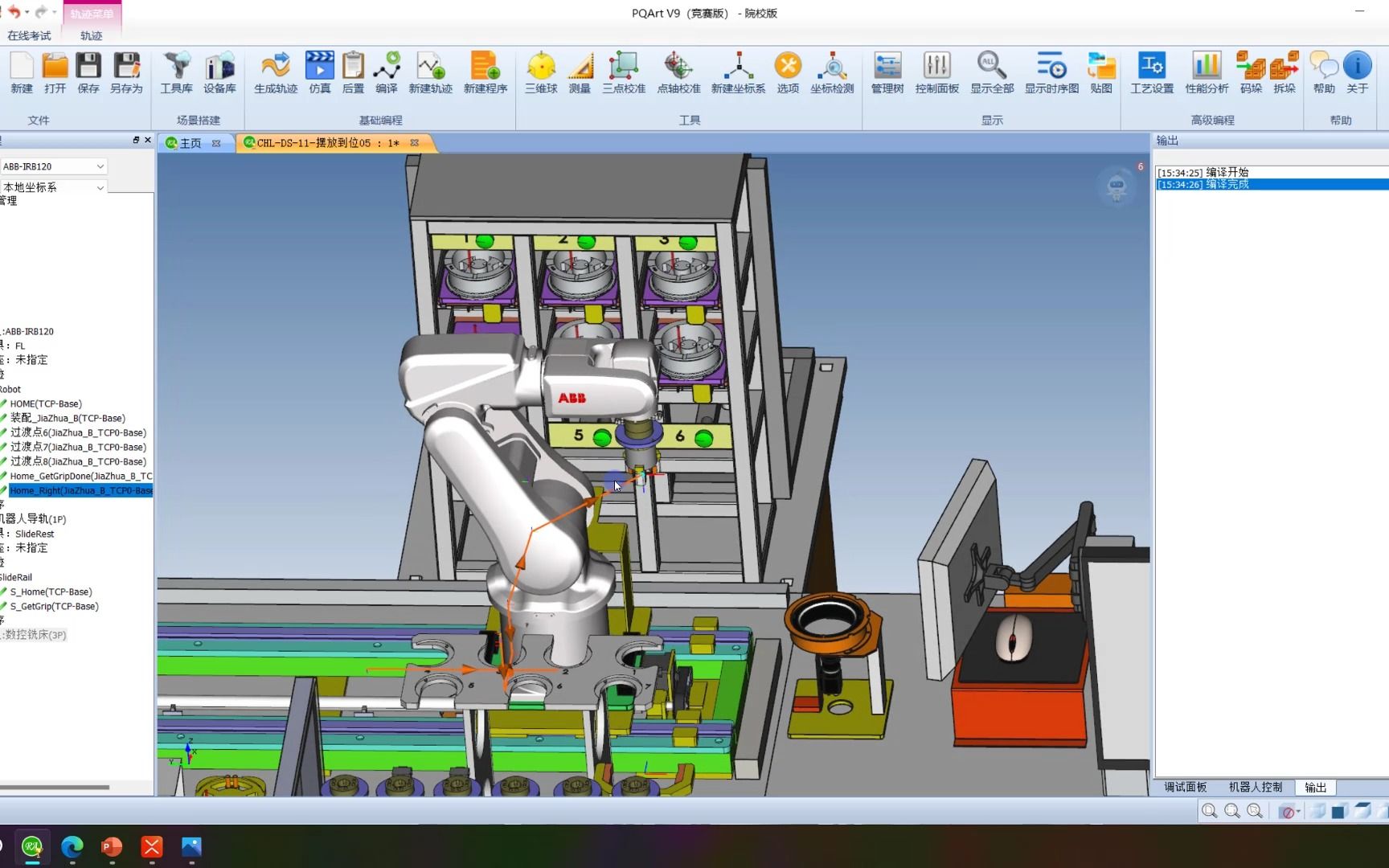
PQArt仿真04-取轮毂和视觉检测
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
视觉02-二维码检测设置(小张同学操作)
视觉01-视觉通讯设置和标签检测设置(小张同学操作)
PQArt仿真-轮毂打磨02-取打磨工具
PQArt仿真05-放轮毂
机器人模拟量信号配置
PQArt仿真-轮毂打磨03-打磨端面1
PQArt仿真08-放轮毂方法2
工业机器人集成应用视觉01-绿色标签检测和文件保存.mp4
PQArt仿真-轮毂打磨05-放打磨工具
机器人系统集成分拣单元程序(1+X_2021_11)
PQArt仿真02-任务分析
PQArt仿真-轮毂打磨04-打磨端面2
PQArt仿真07-导轨回零
视觉03-标签检测结果回传机器人编程和验证(小张同学操作)
视觉04-二维码检测结果回传机器人编程和验证(小张同学操作)
PQArt仿真03-工业机器人与导轨互动、取工具
机器人工具箱-02-运动学
机器人控制伺服进行位置移动
CAD加长幅面的图纸打印
多智能体一致性控制简单入门-一阶模型理论与一致性控制仿真
四足机器人从视觉学习地形物理参数|2024【苏黎世联邦理工学院】
工业机器人简单搬运工作站创建-01工具的创建
方法2一个按钮启动停止(S7-1200)—ADD 加法器
方法1一个按钮启动停止(S7-1200)—SR 置位、复位触发器
CHL-DS-11工作站工业机器人伺服轴的组态
【机器人之梦】 原版 超清 已船
伺服回原点组态
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
工业机器人简单搬运工作站创建-02线传感器的创建与安装
KISSSOFT2022渐开线圆柱齿轮副齿轮设计——第一讲:kisssoft齿轮基本几何参数输入、ISO1328GB/T10095精度选择
【webots】五连杆轮腿机器人仿真控制器开源
(搬运) Learning to Walk and Fly with Adversarial Motion Priors (IROS 2024)
方法4一个按钮启动停止(S7-1200)—CTU 加计数
Abaqus参数化建模及自动化后数据处理程序简介
人形双足模仿学习强化学习AMP ASE Exbody求助
切割掉落
全网最全ANSYS Workbench从入门到精通--基础班
2D圆柱绕流3:UDF及计算
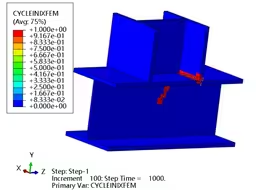
ABAQUS带初始裂纹的节点低周疲劳裂纹扩展
搅拌摩擦焊热源模型与模拟方法