V
主页
京东 11.11 红包
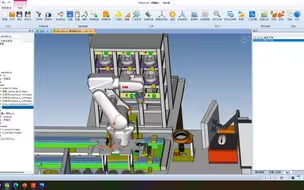
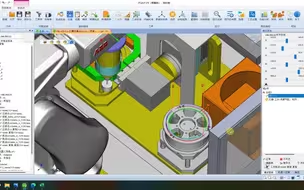
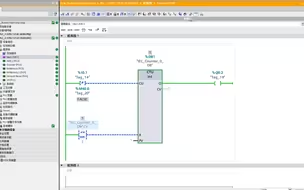
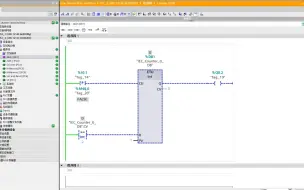
PQArt仿真-轮毂打磨03-打磨端面1
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
PQart仿真01-工作站摆放
PQArt仿真02-任务分析
PQArt仿真04-取轮毂和视觉检测
PQArt仿真08-放轮毂方法2
机器人模拟量信号配置
PQArt仿真-轮毂打磨04-打磨端面2
视觉03-标签检测结果回传机器人编程和验证(小张同学操作)
方法3一个按钮启动停止(S7-1200)—M中间存储器
机器人控制伺服进行位置移动
电池包按策略快充快放联合仿真-AMESIM部分
工业机器人集成应用02-PQArt配置触摸屏
方法1一个按钮启动停止(S7-1200)—SR 置位、复位触发器
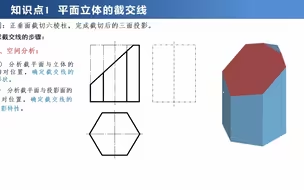
平面立体的截交线
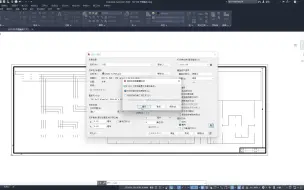
CAD加长幅面的图纸打印
方法4一个按钮启动停止(S7-1200)—CTU 加计数
CHL-DS-11工作站工业机器人伺服轴的组态
郑鼎侯俊霞工业机器人课程 从入门到精通 第3节:工业机器人的品牌
1.1 FANUC发那科-官方工程师培训1《机器人介绍+仿真软件操作+机器人基本操作(上)》
FANUC发那科机器人编程(共18集)
实践3-2 在Simulink中搭建标准型系统的状态观测器
手把手教你用matlab建立电力电子电路模型1-5
视觉02-二维码检测设置(小张同学操作)
方法2一个按钮启动停止(S7-1200)—ADD 加法器
ABB工业机器人虚拟仿真技术 RS教程项目四——基于工业机器人应用编程1+X证书考核平台
Ansys Fluent 2024 R1 GPU求解器:NVIDIA 与 Ansys 合作加速仿真突破
机器人控制伺服回原点例行程序
fluent多孔介质模型
中国追赶世界第一!研制10吨重型武装直升机,比美国科曼奇更先进
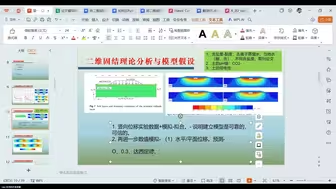
第1节-土木硕士毕业-论文-辅导-二维固结数值模拟
导弹的高超音速流动仿真---比较详实的理论讲解
solidworks第33题
2024-06-20 乐律路骑行片段2
工业机器人简单搬运工作站创建-02线传感器的创建与安装
CHL-DS-11工作站伺服PLC组态
小姐姐教你,如何理解女性的语言
5-带颜色标尺和极值点的静电势(ESP)图作图全过程
fluent仿真指导④「fluent室内通风模型,网格生成、边缘条件设定、计算方法设置等」
我们爱科研!!!COMSOL——入门学习!!小白仿真软件入门
NACHI那智不二越机器人视频教程
4 工程静电场计算--工程仿真计算基础理论与程序实现有限元