V
主页
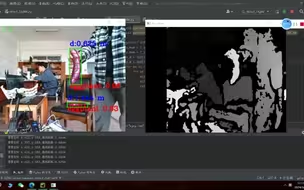
双目摄像头实时测距(SGBM算法)
发布人
使用SGBM算法和双目摄像头进行实时测距
打开封面
下载高清视频
观看高清视频
视频下载器
双目相机原理揭秘--双目立体视觉原理搞懂很简单
【开源| 教程| 双目测距】SGBM算法应用(Python版)
基于双目视觉测距系统演示
三维视觉Demo:实时双目立体匹配(张氏标定+校正)
基于yolov5、sgbm算法,tensorrt加速的双目测距演示
关于低成本双目摄像头测距的想法
基于深度学习和双目SLAM的实时动态建图与定位
【深度学习开源框架】双目深度估计:RAFT-Stereo
单目摄像头测距计算讲解
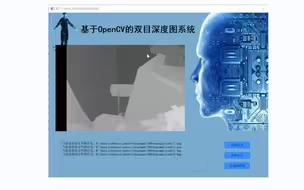
基于OpenCV的双目测距
树莓派摄像头目标检测与测距
双目测距+双目车辆测距+双目识别+双目车辆识别(原创作品)
SGBM算法是一种在立体视觉中广泛应用的视差计算算法,其准确性和稳定性得到了显著提升。在需要精确匹配的场景中,如自动驾驶、机器人导航等领域,SGBM算法
【35元双目摄像头】双目测距(VScode)
【opencv/单目测距】一分钟就能学会的单目测距原理
基于opencv的SGBM对D435i双目做立体匹配输出深度图演示与简单说明 20240326_211324
双目摄像头是如何实现3D感应的
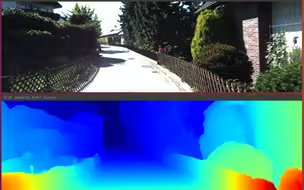
通过SGBM算法生成视差图
告别SGBM,在最便宜的OAK相机上跑最强的双目深度模型
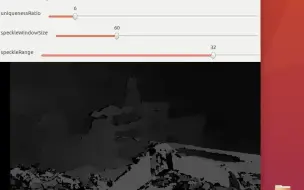
SGBM立体匹配在线调参
5分钟带你看懂深度相机与普通摄像头有什么区别!
【开源| 教程| 双目测距】 Jeston nano部署yolov5,并实现双目测距
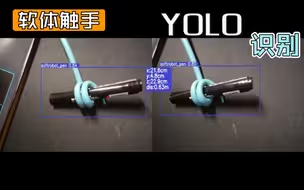
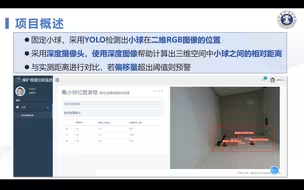
算法YOLO识别定位+软体触手+双目视觉测距
双目相机标定及参数写入
能测0.1米?最小的深度相机OAK-D-SR精度如何?
双目SGBM小工具
【全网最详细】双目摄像头原理分析
Yolov5 深度相机识别与测距
基于matlab的双目三维重建(视差深度图估计)
基于YOLO和双目深度摄像头的煤矿巷道位移监测系统
【一起学Opencv】摄像头标定及双目测距的实现
【计算机视觉】相机标定/双目测距/Camera Calibration
双目相机如何标定
哭了!深度相机测距的精度是这样的?
【开源| 教程| 双目测距】 在YOLOv5中加入双目测距,实现目标测距
双目视觉立体匹配:接近实时
Python基于OpenCV的双目视觉深度图算法(源码&教程)
yolov5+双目测距
双目测距程序讲解 OpenCV python 树莓派 BM匹配算法
双目相机定位乒乓球三维坐标及距离